Ich betreibe eine pfSense-Firewall, hinter der meine Services betrieben werden, die ich für meine Hobbies benötige. Die pfSense wickelt auch andere nützliche Dienste, wie SSL Offloading inkl. ACME-Client für automatischen Zertifikatstausch bei Let’s Encrypt ab oder Loadbalancing für zB. meinen RabbitMQ-Cluster.
Die pfSense läuft als Virtuelle Maschine (VM) auf einem Proxmox Host. Bisher war leider keine ordentliche Implementierung des qemu-guest-agent verfügbar, mit dem einige Management-Funktionen der virtuellen Umgebung auch für die PFsense nutzbar sind.
Seit Version 2.6.0 ist nun ein Paket verfügbar, das sich – zwar nicht über das Webinterface alleine – aber immerhin „ordentlich“ (in meiner Definition) installieren und betreiben lässt, sehr gut funktioniert und mit sinnvollem Aufwand zu installieren ist.
1) öffne die Console und gib folgendes Kommando für die Installation ein:
pkg install qemu-guest-agent
2) man benötigt das Paket „Shellcmd“, um beim Booten den automatischen Start des qemu-guest-agent einzurichten. Die Installation erfolgt über das Webinterface: 2a) unter System / Paketverwaltung das Paket „Shellcmd“ installieren. 2b) nun ist unter Dienste / Shellcmd möglich, dieses Kommando hinzuzufügen, das ab sofort bei jedem Reboot den Dienst startet:
service qemu-guest-agent start
3) in der Datei /etc/rc.local (in manchen Anleitungen steht /etc/rc.conf.local, für pfSense+ ist es /etc/rc.conf) muss man nun folgende Zeilen einfügen:
Damit ist die Installation abgeschlossen! Nach einem Reboot sollte der Dienst starten bzw. laufen und scheint bei mir in der Proxmox-Umgebung auch sofort auf.
4) als letzter Schritt wird empfohlen, in den Erweiterte Einstellungen / System Feinabstimmung („Tunables“) folgenden Eintrag hinzuzufügen:
Abstimmungsname: virtio_console_load
Wert: YES
Hinweis zu Fehlermeldung
Sollte (ist bei pfSense+ aufgetreten) in der Logdatei qemu-ag.log folgendes zu finden sein, dann ist der Qemu-Guest-Agent bei er VM noch nicht aktiv:
1680079085.256215: debug: disabling command: guest-fstrim 1680079085.256276: critical: error opening channel: No such file or directory 1680079085.256287: critical: error opening channel 1680079085.256293: critical: failed to create guest agent channel 1680079085.256300: critical: failed to initialize guest agent channel
Vielen Dank an Alexander Grümmer für die Ergänzungen, die er mir im März 2023 für pfSense+ geschickt hat, nachdem dort kleinere Anpassungen notwendig waren.
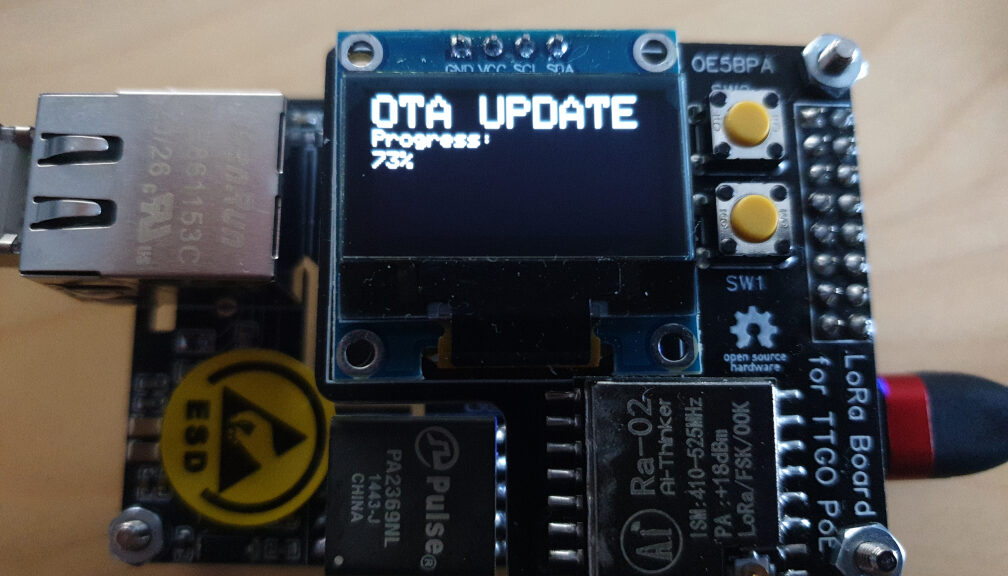
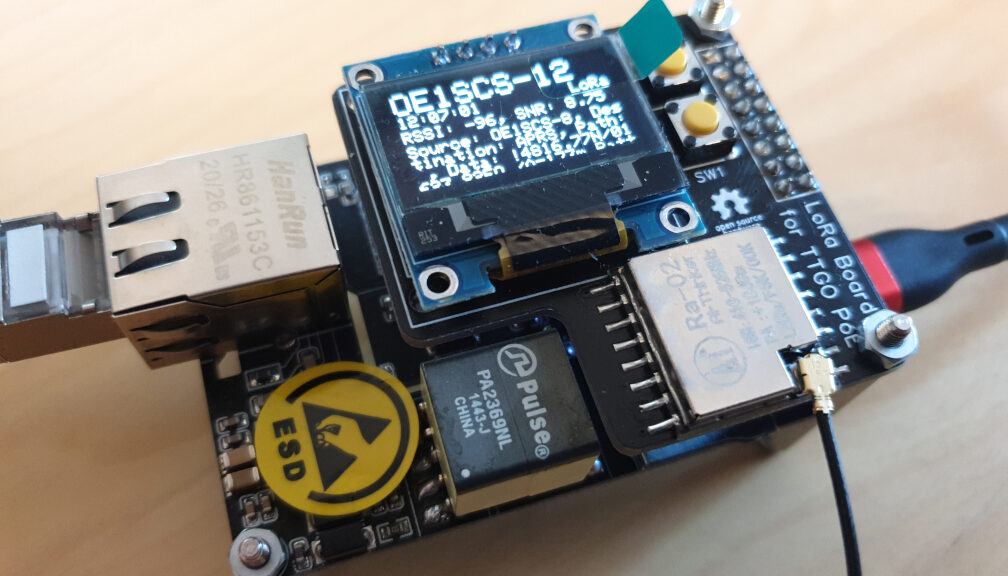
Ich setze seit kurzem die ESP32 basierenden Gateways (PoE-fähig!) für LoRa APRS auf 70cm von OE5BPA ein. Nachdem ich diese iGates nicht nur zu Hause betreibe, sondern auch bei Relaisstationen an exponierten Standorten installiere, ist mir wichtig, dass auch neue Entwicklungen dort genutzt werden können – das setzt voraus, dass ich die Konfiguration von der Ferne anpassen kann (das funktioniert wunderbar über FTP und ist von Peter OE5BPA bereits gut beschrieben worden) und auch Firmware Updates mit neuen Features von der Ferne installiert werden können. Dieses Feature nennt sich Firmware Update over The Air (kurz: FOTA- oder OTA-Update).
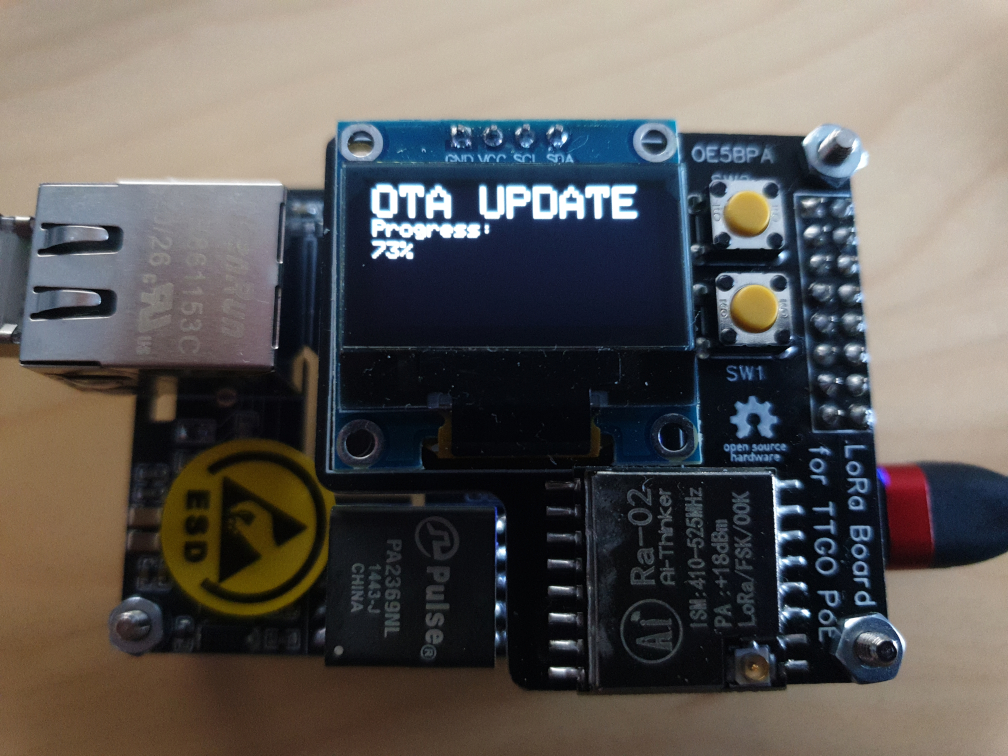
iGate bei 73% des Over The Air Firmware Updates
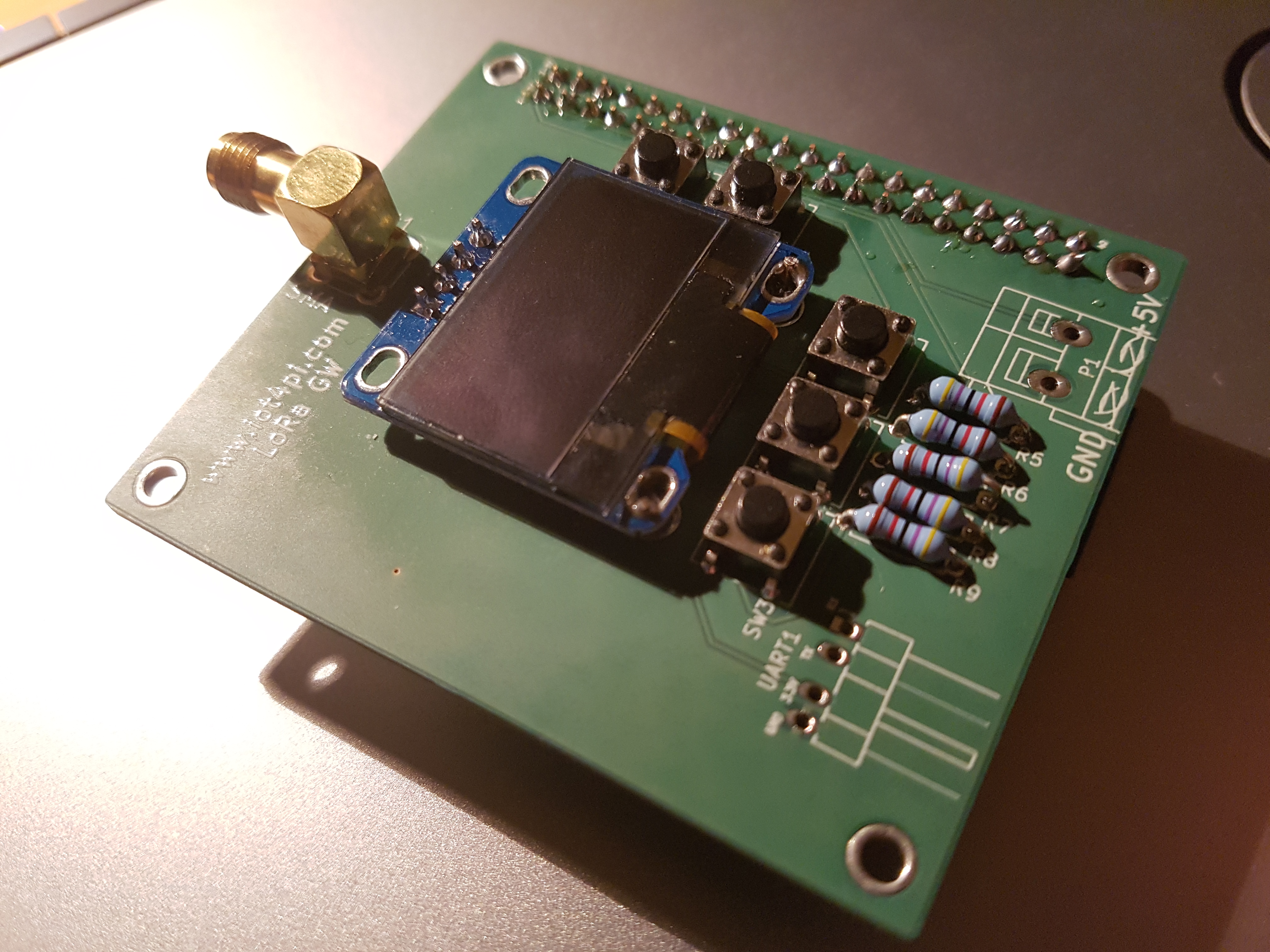
Eine Beschreibung der Hardware findet ihr hier auf meinem Blog. Da ich die Geräte über PoE nutze, gibt es hier für Interessierte eine Übersicht über PoE, die früher mal geschrieben habe.
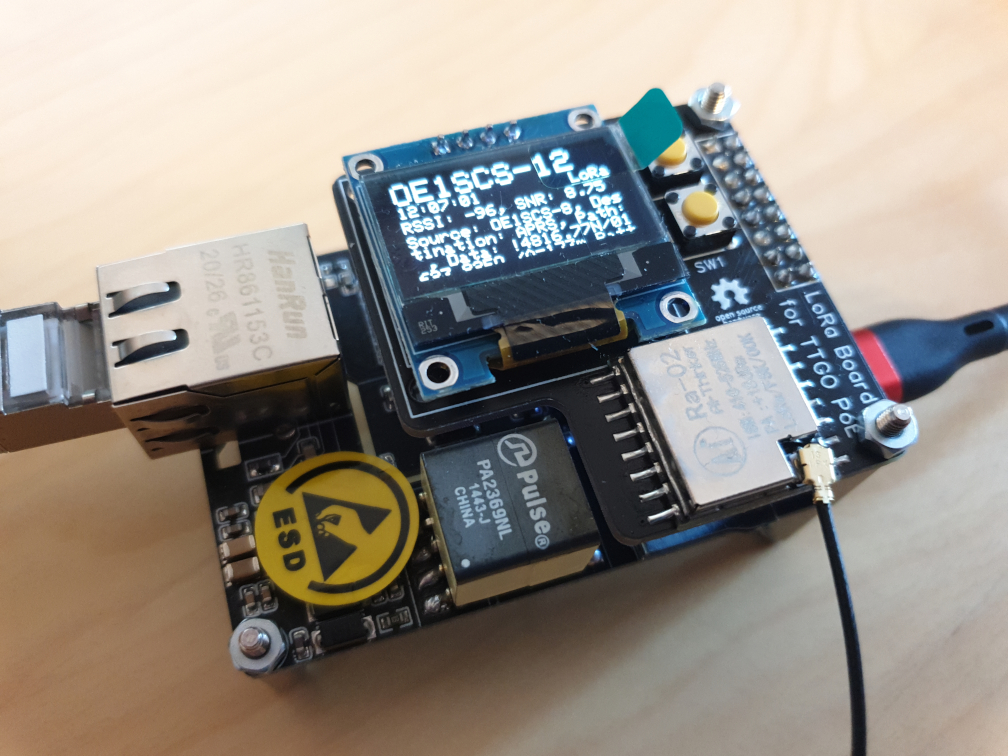
iGate im (Test-)Betrieb
Nachdem ich kein Programmierer bin und auch mit der Entwicklungsumgebung Platformio (siehe auch https://platformio.org) noch nicht viel Erfahrung habe, war mir am Anfang nicht ganz klar, wie das FOTA/OTA funktioniert. Daher möchte ich es hier kurz beschreiben.
Welche Schritte sind für uns Benutzer nun also nötig, um ein Update durchzuführen? Die Voraussetzung ist, dass die Umgebung so aufgesetzt ist, dass der Code fehlerfrei kompiliert, also alle Bibliotheken vorhanden sind uä. Damit wäre ja das Update über USB machbar. Wenn das klappt, prüft man die Einstellungen bzw. Konfiguration, die befinden sich in der Datei is-cfg.json.
Auch wenn man bisher noch kein Update Over the Air durchgeführt hat, ist es dennoch auf den iGates auf der Firmware aktiv. Es ist also möglich, einen Gateway, den man vor ein paar Wochen installiert hat, künftig OTA zu aktualisieren.
Wie geht das nun? Ein Blick in die Datei platformio.ini, im Anfangsverzeichnis des Projekts, zeigt uns die Konfiguration:
# activate for OTA Update, use the CALLSIGN from is-cfg.h as upload_port:
upload_protocol = espota
upload_port = OE1SCS-12.local
Im Beispiel oben möchte ich den iGate „OE1SCS-12“ updaten, der sich bei mir im LAN befindet. Falls sich dein iGate auch im LAN befindet, brauchst du also nur ggf. die Kommentare rausnehmen und den Call deines iGates – gefolgt durch .local – ersetzen.
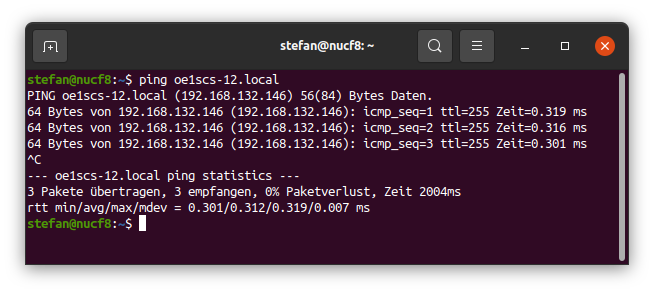
Peter hat die Konfiguration so gewählt, dass sich die Gateways mit dem mDNS-Namen (multicast DNS) unter dem Namen des iGate + .local registrieren. mDNS ist ein DNS-Dienst, der keine Server benötigt, sondern über Multicast (dafür nur im gleichen LAN) DNS-Namen ermöglicht. Ich kann also meinen Gateway auch über diese Adresse pingen:
mDNS im LAN funktioniert, ich kann mein iGate erreichen
Dazu muss natürlich die Konfiguration erstmal (vmtl. über USB) auf dem iGate aufgebracht sein, danach ist ein Update wie beschrieben möglich.
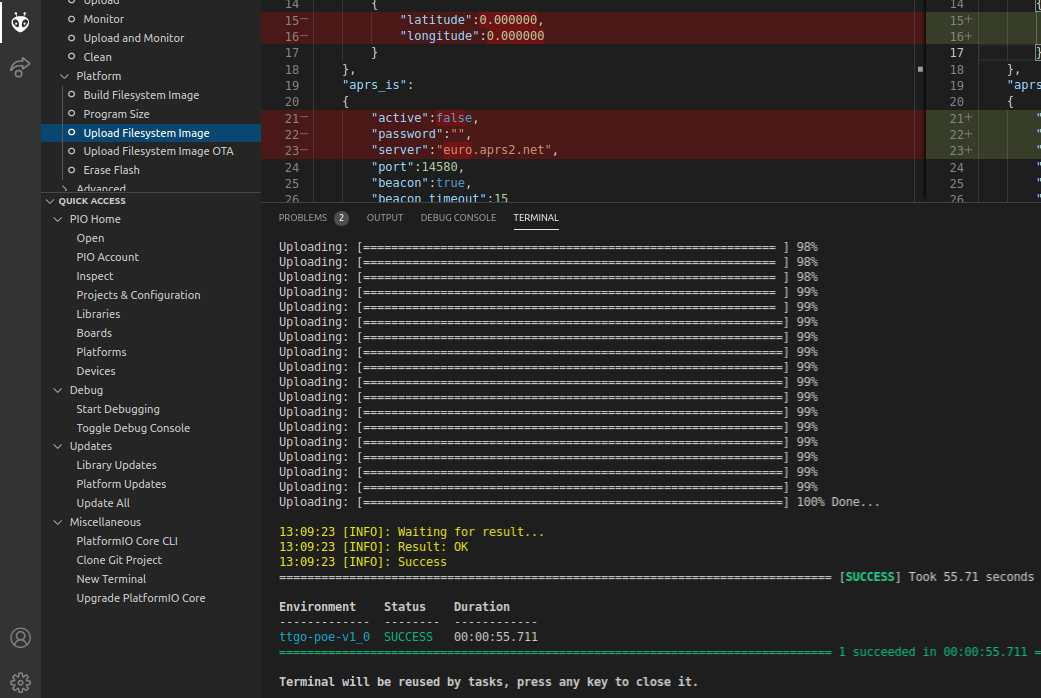
Wenn das klappt, kann ich in Platformio das „Alien“-Symobl auswählen und „Upload Filesystem Image“. Schon wird Platformio die aktuelle Version builden (quasi kompilieren) und über das Netzwerk upgraden:
OTA läuft
Im „Task“ Fenster bei Platformio (auch Konsole) genannt kann man den Status verfolgen:
Wenn die Meldung „SUCCESS“ auftaucht, war der Vorgang erfolgreich. Der iGate startet nun die neue Firmware und sollte in Kürze erreichbar sein.
Und wie funktioniert das über die Ferne? Ganz einfach: man ersetzt in der platformio.ini den mDNS-Eintrag (in meinem Fall „OE1SCS-12.local“ durch die IP-Adresse des in der Ferne installierten iGates, speichert die Änderung und kann nun genauso von der Ferne das Update einspielen! In meinem Fall sieht das dann so aus:
# activate for OTA Update, use the CALLSIGN from is-cfg.h as upload_port:
upload_protocol = espota
upload_port = 192.168.132.146
In meinem Blog habe ich häufig Raspberry-basierte Lösungen und Anwendungen beschrieben. In letzter Zeit (in den letzten 1-2 Jahren) entstehen in der Community aber immer mehr Lösungen auf Basis von ESP8266 bzw. dem quasi-Nachfolger ESP32, also basierend auf einem „Mikroprozessor“ und nicht einem vollständigen Linux-System, wie es beim Raspberry der Fall ist. Das finde ich sehr toll, weil damit die Pflege des vollständigen Linux-Systems hinfällig wird und ich leider auch schon viele SD-Karten tauschen musste, die mit der Zeit kaputt geworden sind. Immerhin sind die Rapsberrys oft im Außenbereich den Temperaturschwankungen und Änderungen der Luftfeuchtigkeit des Wetters und der Jahreszeiten ausgesetzt.
ESP32 basierter APRS LoRa iGate von OE5BPA
Als Client, Node, Tracker, Endgerät – wie auch immer man es nennen möchte – ist der ESP8266 schon länger im Einsatz. Neu ist, dass nun mit dem ESP32 Prozessor ein leistungsstarker Kern verfügbar ist, der auch Anwendungen ermöglicht, die früher einen Raspberry oder ähnliche Geräte erfordert hätten. Immerhin hat der im Jahr 2016 vorgsetellte ESP32 beeindruckende Leistungsdaten (für einen stromsparenden Mikroprozessor): 160 bis 240 MHz auf einer Dual-Core-Plattform mit 520 KB SRAM. Eingebaut sind WLAN (802.11 b/g/n) mit Bluetooth und zahlreiche Schnittstellen, auszugsweise zB.: GPIOs, 12bit ADC und 8bit DAC, SPI, I²S, I²C, UART, Unterstützung für SD/eMMC, Ethernet, CAN 2.0 uvm. Das Datenblatt gibt dazu mehr Auskunft.
Nachdem in diesem Leistungsbereich jetzt neue Anwendungen ermöglich werden, freut es mich besonders, dass Initiativen wie LoRa APRS davon profitieren und handfeste Lösungen auch für den Gateway-Einsatz (als iGate) verfügbar sind, aktiv entwickelt und laufend verbessert werden.
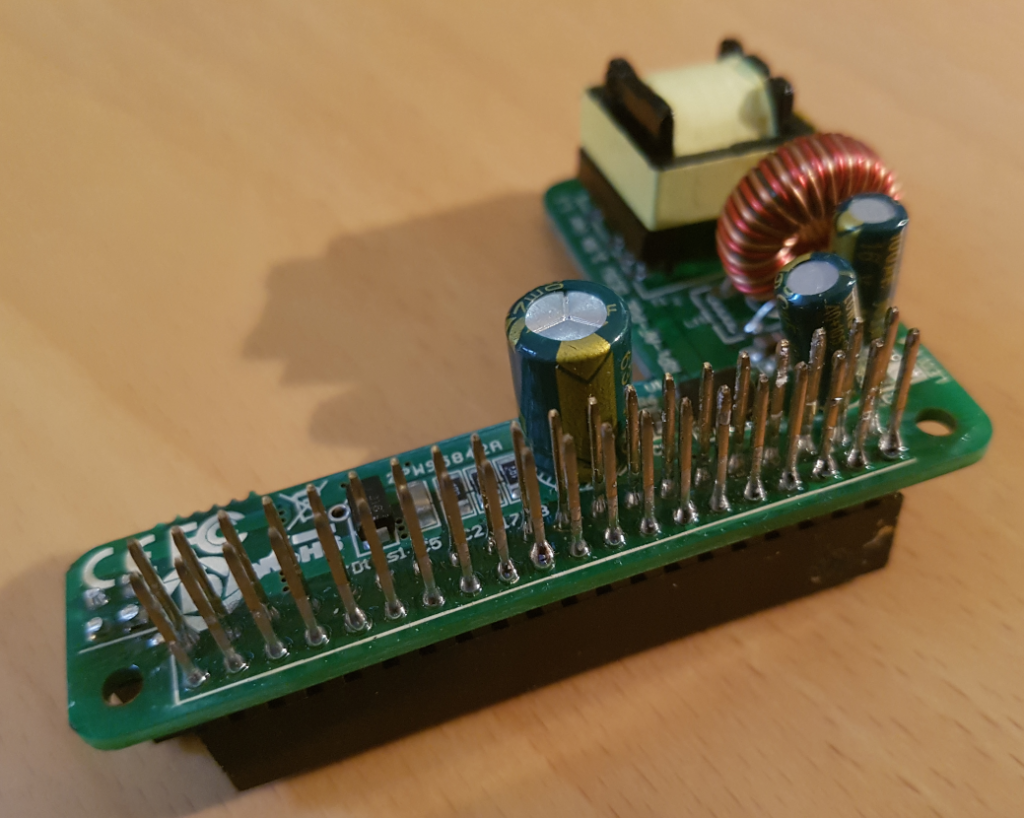
Ich nutze viele PoE Converter, um die nominal 48V von PoE bzw. PoE+ gemäß 802.3af / 802.3at auf 5V zu übersetzen und über Micro-USB dem Raspberry bereitzustellen. (Bei Raspi 4B ab jetzt natürlich häufiger mit USB-C).
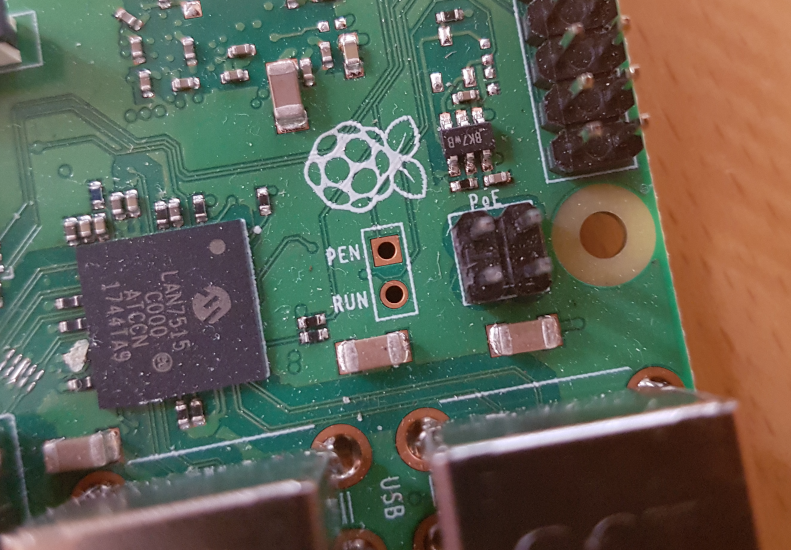
Die neueren Raspberry-Modelle (3B+ und 4B) unterstützen ein offizielles Raspberry PoE HAT Modul. Dazu wurden 4 weitere PINs auf dem PCB des Raspberry Pi gesetzt und vom PoE HAT genutzt:
mitte/rechts: die 4 PINs für PoE
günstiges PoE HAT
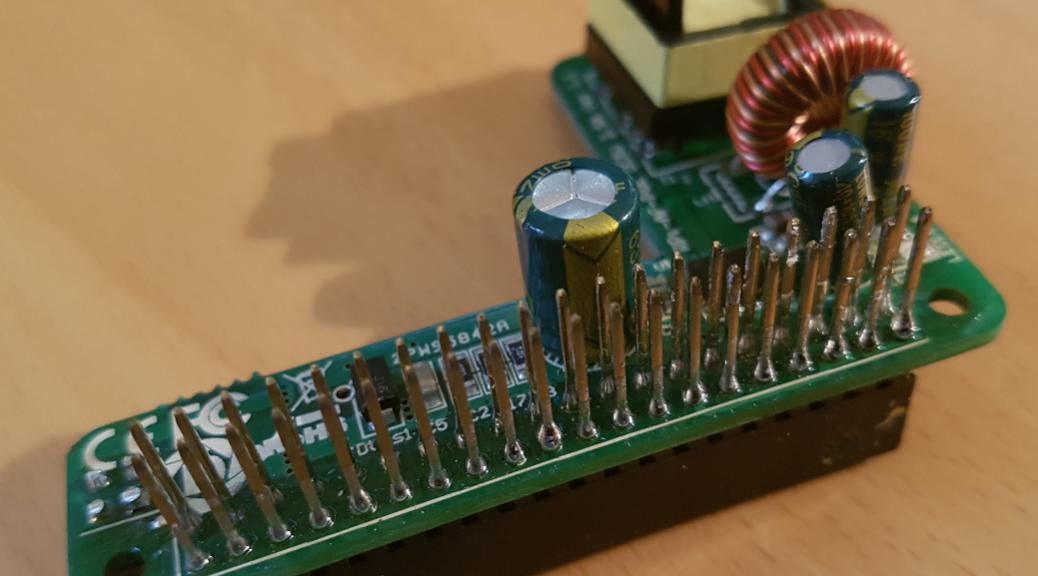
Ich betrachte in diesem Blog nicht das offizielle PoE HAT, sondern eine günstige Alternative ohne Lüfter:
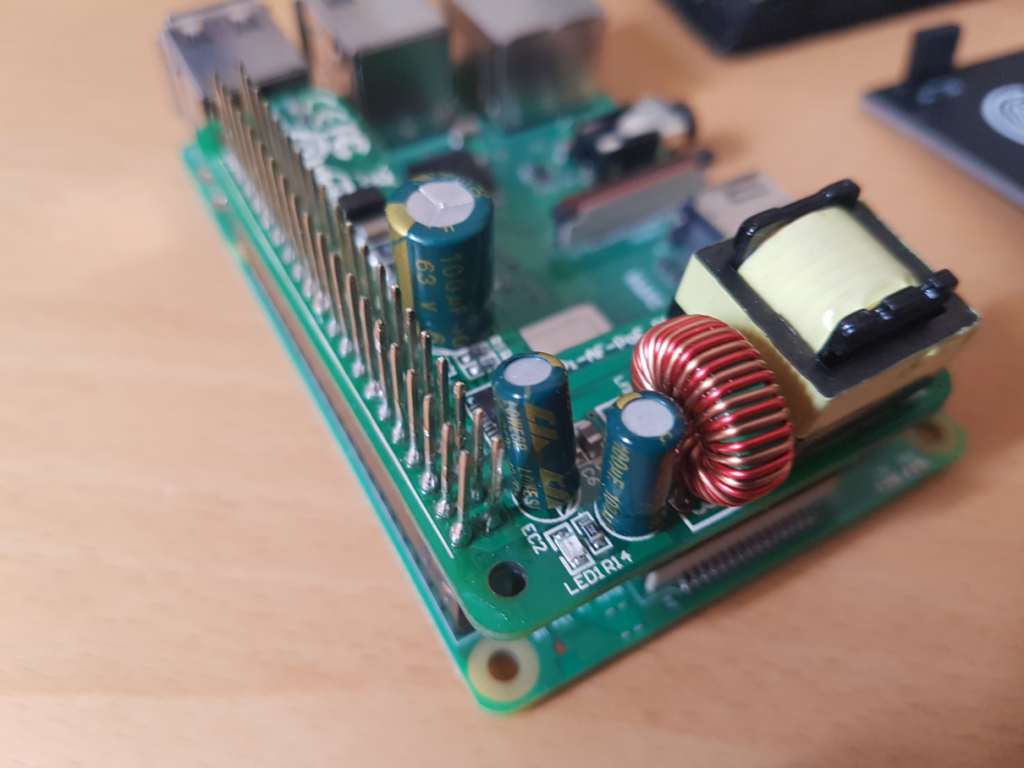
die günstige Alternative zum offiziellen PoE HAT
Im Gegensatz zum offiziellen PoE HAT gibt es hier zwar keine vorgesehene Position für einen Lüfter, allerdings sind die GPIO PINs verlängert bzw. werden durch das günstige PoE HAT durchgereicht. Ich kann also weitere HAT Aufsteckmodule nutzen.
Gekauft habe ich das Modul bei Aliexpress, es ist auch zB. über Amazon erhältlich:
Ich habe es auf einen Raspberry 3B+ gesteckt und an ein Kabel, das von einem Ubiquiti EdgeSwitch 8 150W mit PoE+ versorgt wird.
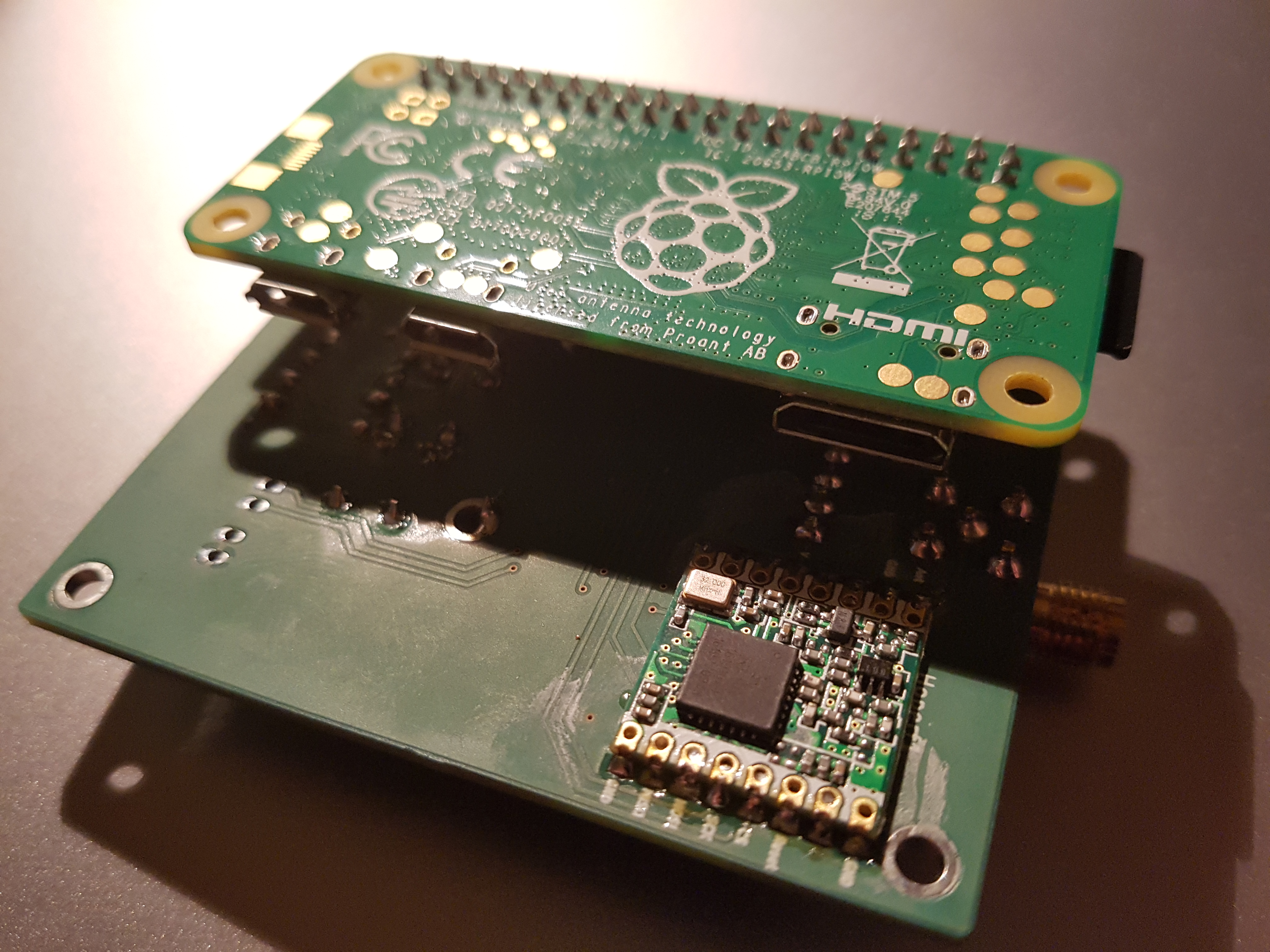
Mein Ziel ist, einen LoRaWAN Gateway zu testen, der über PoE versorgt wird und LoRaWAN über ein IMST ic880a Board abwickelt. Um das ic880a Board am Raspberry GPIO zu betreiben ist ein Adapterboard nötig, das ich vom Verein OpenIoT erhalten habe.
Raspberry mit bereits aufgestecktem PoE HAT, OpenIoT Adapterboard und IMST ic880a (oben)
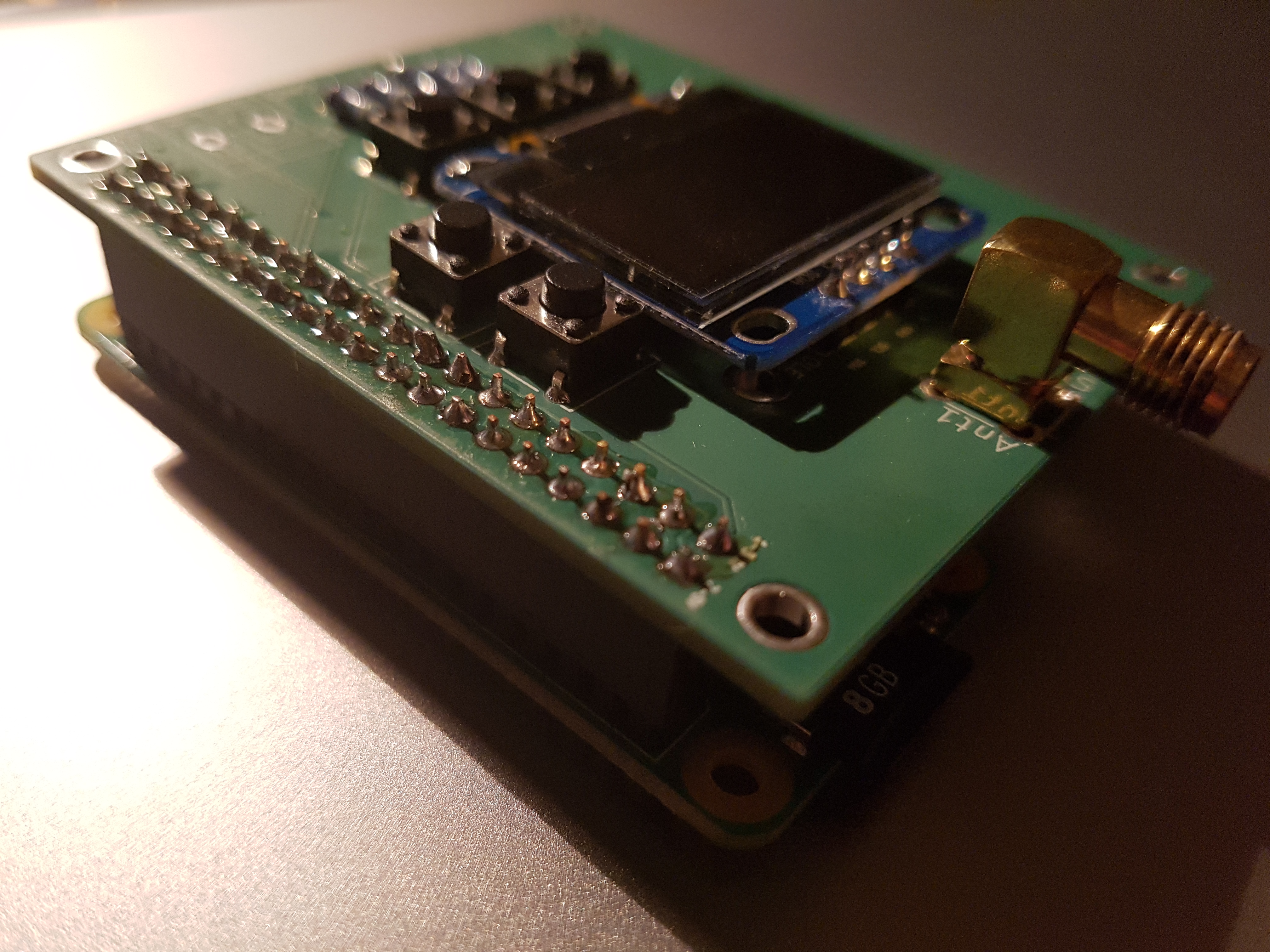
In Kombination sieht das „Sandwich“ dann so aus:
Die Module sind halbwegs stabil, ein gutes Gehäuse sollte dennoch her. Es sind leider keine Bohrungen für Distanzhalter vorgesehen.
Ich habe das Board mit einem Ubiquiti EdgeSwitch getestet, der EdgeSwitch unterstützt den PoE+-Standard und gibt mir auch die aktuelle Leistung je Port an: im Leerlauf zieht ein Raspberry 3 B+ mit Raspbian Lite (Buster) nach einer frischen Installation etwa angezeigt 3,6 Watt.
Wenn ich das LoRaWAN Concentrator Board aufsetze und neu starte, wechselt die Anzeige zwischen 6,1 und 6,5 Watt:
PoE Verbrauch mit IMST ic880a LoRaWAN concentrator board in Betrieb
Auch auf einem Raspberry 4B hat sich das günstige PoE HAT problemlos betreiben lassen.
Temperatur
Bemerkenswert ist, dass das Gerät sehr heiß wird, wenn das IMST Board, das ja die Leistungsaufnahme ggü. dem Raspberry verdoppelt, angeschlossen wird. Die Angabe auf dem PoE HAT sind 2,5A – also 12 Watt. Wir nutzen hier zirka die Hälfte und es geht schon heiß her. Die Core Temperatur zeigt etwa 60 Grad bei Nutzung mit dem IMST Board. Dabei ist natürlich auch der Prozessor unter mehreren Aufsteckmodulen versteckt und hat wenig Luftzirkulation. Ohne LoRaWAN-HATs hat es etwa 53 Grad im Bereich der CPU.
Einen Langzeittest habe ich noch nicht gemacht, ich werde den Artikel hier dann aber mit den Erkenntnissen erweitern.
Das Modul funktioniert sehr gut, erspart mir in Zukunft hoffentlich einen weiteren externen Adapter, um PoE über MikroUSB oder USB-C dem Raspi zu geben.
Beobachten möchte ich die Temperatur, weil als Nebenwirkung des Boards der Raspi auffällig heiß wird.
Links zu den Modulen
Hier eine Übersicht der im Beitrag vorgestellten Artikel/Produkte:
Bei vielen Anwendungen nutze ich Power over Ethernet (= PoE). Ist doch praktisch: ein Netzwerkabel wird für die Anwendung oft sowieso benötigt, dann kann man es auch gleich nutzen, um das Endgerät mit Strom zu versorgen. Außerdem ist oft keine Steckdose, wo man sie benötigen würde. Ich habe grundsätzlich nur gute Erfahrungen damit gemacht, teilweise entstehen durch die Nutzung von PoE auch neue Möglichkeiten. Es gibt jedoch verschiedene Standards und Varianten – und die müssen zusammenpassen. Hier also eine kleine Übersicht, die meinen Wissensstand und meine Erfahrungen widerspiegeln.
Im Wesentlichen sehe ich zwei große Varianten an PoE:
Passives PoE und
PoE nach 802.3af oder 802.3at (auch aktives PoE genannt, bzw. PoE+ bei 802.3at)
Beachtet, dass diese Varianten nicht miteinander kompatibel sind.
Passives PoE
Bei passivem PoE werden mehrere Adern des 8-poligen-Gigabit-Ethernet-Kabels für die Übertragung von Strom genutzt. Meist werden die Adern 4+5 für + und 7+8 für – genutzt. Hier wird einfach Strom von einem Netzteil (auch Injector genannt) durchgeschickt. Grundsätzlich sollte man hier vorsichtig sein, dass man (a) die richtige PoE-Variante einsetzt, (b) die korrekte Spannung überträgt und (c) das Endgerät das unterstützt. Sonst könnte es passieren, dass eine Netzwerkkarte defekt wird, wenn ihr einfach über diese PINs der Strom geschickt wird.
Es gibt viele gängige Varianten, die sich meist durch die Spannung unterscheiden. Bei Ubiquiti und Mikrotik findet man meist 24V passive PoE, in anderen Anwendungen (zB. Videokameras) kommt oft 12V zum Einsatz. Vereinzelt sieht man 5V, hier habe ich die Erfahrung gemacht, dass bei größeren Kabellängen (bereits so ab 10m) der Spannungsabfall relevant wird, von 5V würde ich also abraten bei passive PoE.
In den meisten Anwendungen sieht man, dass ca. 2,1 bis max. 2,5 Ampere übertragen werden. Je nach Spannung kann man also leicht ausrechnen, wieviel Leistung mit dieser Variante zur Verfügung gestellt werden kann. Bei 24V mit 2,1A sind das bereits gut 50 Watt, bei 12V die Hälfte.
Passives PoE heißt also so, weil es einfach Strom durchschickt, ohne weiterer Überprüfung oder Logik.
PoE & PoE+ nach 802.3af und 802.3at
Man sieht an der Überschrift: diese Variante ist genauer standardisiert. Die IEEE hat im Standard 802.3af und 802.3at genau spezifiziert, wie PoE durch das Netzwerkkabel geschickt wird und viele Hersteller nutzen diesen Standard. Das erhöht natürlich die Kompatibilität und so wird es möglich, einen PoE-fähigen-Switch mit beliebigen Endgeräten zu verbinden.
PoE und PoE+ orientieren sich an 48V (Nominalspannung), tatsächlich sieht der Standard 36V bis 57V vor. Das ist schon vernünftig aufgrund der Robustheit bei längeren Ethernet-Verbindungen.
Meines Wissens nach unterscheiden sich PoE (IEEE 802.3af) und PoE+ (IEEE 802.3at) vor allem aufgrund der maximal vorgesehenen Leistung. Diese wird beim Anschluss des Kabels „detektiert“, dafür gibt es einen ausgeklügelten Mechanismus, der den Widerstand des Engerätes misst und darüber erfährt, welchen Standard und welche Leistungsklasse das Endgerät unterstützt. Tolle Sache, va. ist hier auch abgesichert, dass ein Endgerät ohne PoE-Funktion keinen Schaden nimmt und nicht einfach Spannung durchgeschickt wird, wie bei der passiven Variante.
Grundsätzlich würde ich, wenn möglich, dieser Variante von PoE den Vorzug geben.
Falls euch Details zu den Modi, Spannungen, der Detektion und den Leistungsklassen interessiert, möchte ich auf die Wikipedia-Seite verweisen, da diese sehr ausführlich darüber aufklärt: https://de.wikipedia.org/wiki/Power_over_Ethernet
Anmerken möchte ich noch, dass es auch bei IEEE 802.3af/at eine passive Variante gibt, dort werden die PINs 1+2 für + und 3+6 für – genutzt. Vor allem günstigere Injectoren und Splitter setzen darauf. Bisher habe ich keine Probleme damit gehabt. Splitter nach dem 802.3af/at-Standard haben in allen Kombinationen mit Injectoren & Switches funktioniert.
PoE bei Switches
Es gibt von verschiedenen Herstellern zahlreiche Switches, die PoE unterstützen. Die meisten setzen auch hier auf den 802.3af/at-Standard.
Ich finde es sehr praktisch, dass man von Switches aus direkt die Endgeräte mit Strom versorgen kann. Meistens sind diese Endgeräte WLAN Access Points oder IP Kameras. Ich nutze es aber auch gerne für Raspberry Pi oder Arduinos (und andere IoT-Geräte oder Sensoren).
Ein wesentlicher Vorteil hierbei ist, dass man am Switch (meist per Webinterface) den Port PoE-mäßig resetten kann. Wenn also eine IP Cam nicht mehr reagiert, kann ich bequem einen Restart auslösen. Das ist vor allem praktisch bei weit entfernten Standorten und erhöht die Betriebssicherheit immens. Manche Switches können auch Endgeräte per PING überwachen, und wenn diese ein paar Minuten nicht mehr erreichbar sind, resetten sie PoE am Port automatisch.
Bei einer Sache muss man jedoch achtgeben: PoE Switches haben meist ein „Power Budget“, also eine maximale Leistung (in Watt), die sie auf einzelnen Ports oder insgesamt(!) bedienen können. Es kann also sein, dass auf einem 24-Port-PoE-Switch, der zB. 70 Watt Power Budget unterstützt, nicht auf jedem Port eine Kamera mit PoE versorgt werden kann. Das sollte man sich vorher überlegen und danach den richtigen Switch mit der richtigen Leistung wählen.
PoE Adapter für DIY-Projekte
Ich werde oft gefragt, welche PoE-Injectoren (= führt die Spannung in das Netzwerkkabel und enthält manchmal direkt das Netzteil) ich verwende und wie ich die Endgeräte anschließe, zB. Raspberry PI.
Ich führe hier also ein paar Geräte an, die kostengünstig sind und mit denen ich gute Erfahrungen gemacht habe. Die Teile sind Großteils bei Amazon erhältlich oder – wenn man mehr Zeit für die Lieferung hat – auch bei Aliexpress.
Für den Zugriff zu einem Projektarbeitsbereich haben wir beschlossen OpenVPN mit PFsense / OpnSense Firewalls zu nutzen.
Nach der Konfiguration der Firewall gibt es die Möglichkeit, das Profil für die Endbenutzer in einer .ovpn-Datei zu exportieren. Diese enthält bereits die wichtigsten Konfigurationsparameter wie den Servernamen der Firewall zu der man verbinden will, das Protokoll, genauere Details dazu und auch die Zertifikate sind enthalten. Toll, alles in einer Datei!
Unter Linux (Ubuntu 18.04 Desktop in meinem Fall) mit Gnome Desktop hat das auf den ersten Blick komplizierter gewirkt. Ist es aber nicht wirklich, wenn man weiß wie:
Zuerst installiert man die Network Manager-Erweiterung. Falls OpenVPN nicht schon installiert ist, wird diese automatisch mitinstalliert:
apt-get install network-manager-openvpn-gnome
Nun kann man das .ovpn-File, das wir für Windows bereits erzeugt haben, importieren:
nmcli connection import type openvpn file vpn-config.ovpn
Ab sofort scheint die Verbindung im Network Manager auf. Ich musste dann doch noch einzelne Parameter anpassen, bis es funktioniert hat, das war aber schnell erledigt:
Ich musste meinen Benutzernamen eingeben, das hat er nicht aus dem .ovpn-Konfigfile automatisch übernommen. Weiters habe ich ausgewählt, dass die Verbindung nur mir und nicht anderen Benutzern zur Verfügung steht. Fertig! Ich kann mich verbinden und auf die Daten über das VPN zugreifen.
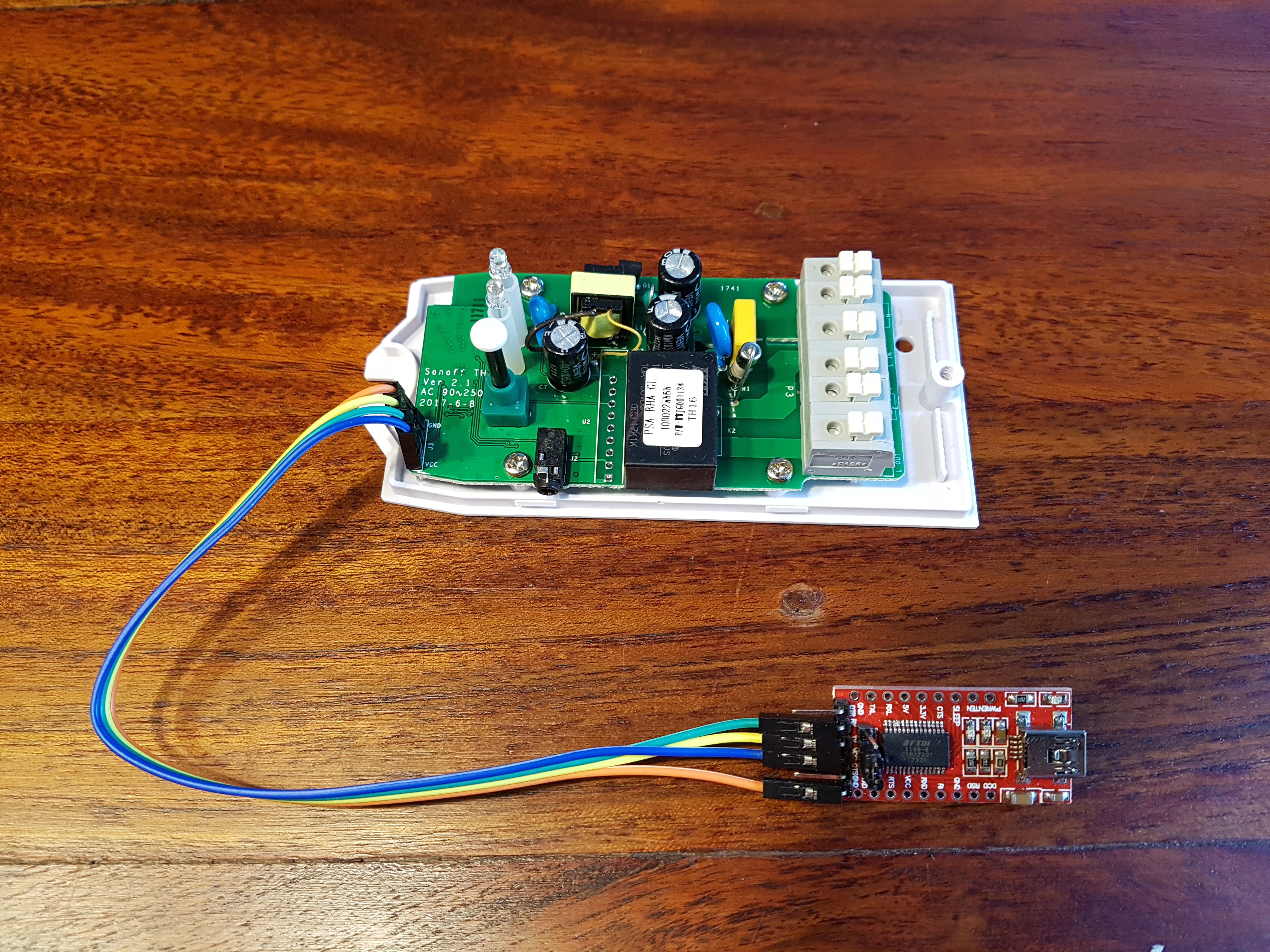
Vor einigen Monaten bin ich von einem Freund auf die Produkte von Sonoff aufmerksam geworden. Die Geräte von Sonoff sind sehr preiswert und ermöglichen das Schalten von Verbrauchern, Auslesen von Sensorwerten und Messwerten.
Das Besondere dabei: die Geräte nutzen WLAN für die Kommunikation. Dafür wird der ESP8266 Chip verwendet, den viele schon aus der IoT („Internet of Things“)-Welt kennen. Es gibt neben der Sonoff-Software auch alternative Open Source-Projekte, mit denen die Geräte unabhängig von der „Sonoff-Cloud“ betrieben werden können. Beispielsweise verwende ich die TASMOTA-Software, um meine Sensoren und Aktoren von Sonoff mit FHEM zu nutzen. Der Austausch der Informationen funktioniert dabei mittels MQTT, wodurch man sehr flexibel ist – auch bei der Integration mit anderen Systemen.
Kurzer Überblick
Die Sonoff-Produkte senden ihre Daten entweder über ein eigenes Protokoll im 433-MHz-Bereich oder über WLAN. Ich konzentriere mich hier auf die WLAN-Nutzung, da sich damit für mich mehr Anwendungen realisieren lassen.
Schalter
Zum Schalten von 230 Volt-Endgeräten gibt es mehrere Möglichkeiten:
Es gibt noch etliche weitere Produkte von Sonoff. Stöbert doch einfach mal! Beim Kauf empfehle ich darauf zu achten, ob das Teil über WLAN oder 433 MHz zu betreiben ist, damit alle Produkte zueinander kompatibel sind.
Software / Firmware
Falls ihr die Geräte werden nach dem Kauf mit der Original-Software betreiben möchtet, gibt es eine entsprechende Smartphone-App für die Konfiguration. Die Daten landen in der Sonoff-Cloud und können dort mit Diensten wie zB. Alexa oder IFTTT verknüpft werden. Natürlich ist man hier von der Cloud abhängig.
Als Alternative kann ich die Software TASMOTA empfehlen. Man muss zwar einmalig jedes Gerät mit TASMOTA flashen (ein TTL-Konverter mit 3,3V wird benötigt), ist dann jedoch unabhängiger. Man kann Schaltbefehle über ein Webinterface steuern oder das Gerät per MQTT an eine Haussteuerung oä. anbinden. Für diese Variante hat man zwar ein bißerl mehr Aufwand, ist aber unabhängiger.
Ich beziehe mich bewusst nicht nur auf Handys bzw. Smartphones, weil ich glaube, dass dieses induktive Laden viele andere Anwendungsmöglichkeiten bietet. Ich möchte ja auch den Akku eines tragbaren LoRaWAN-Sensors künftig induktiv laden, aber das ist ein anderes Thema…
Dass es die Möglichkeit gibt, Smartphones induktiv aufzuladen, ist mir schon länger bewusst. Ich habe aber auch gesehen, dass es mehrere Standards gibt, die nur eingeschränkt (wenn überhaupt) kompatibel erscheinen. Im letzten Urlaub habe ich einiges zu dem Thema gelesen und bin nun auf den Zug aufgesprungen und sehr begeistert.
Hauptgrund war, dass es nun einen von allen Herstellern anerkannten und kompatiblen Standard gibt und meine Bedenken hinsichtlich Gesundheitsproblemen durch permanente Strahlung zerstreut wurden.
Funktionsweise
Induktives Laden läuft: 53%. Ca. 1 h 22 min bis voll geladen
Wie funktioniert das induktive Laden? Im Prinzip werden eine Ladeschale (oder Halterung) benötigt, die mit einer Stromversorgung (meist USB) verbunden ist und ein Endgerät (Smartphone), das induktives Laden unterstützt. Sobald man das Smartphone auf die Ladeschale legt, beginnt das Handy zu laden.
Dabei bedient man sich einer Technologie, die von Transformatoren her längst bekannt und im Einsatz ist: eine Spule in der Ladeschale induziert ein Magnetfeld und dieses wird von einer Spule im Smartphone wieder in elektrischen Strom umgewandelt.
Spezifikation
Das Wort „Qi“ bedeutet auf chinesisch „Lebensenergie“ und ist vielleicht von Qi Gong her bekannt. Hier beschreibt der Name die proprietäre Technologie des Wireless Power Consortiums. Nachdem sich der konkurrierende Standard „Powermat“ der „Power Matters Alliance“ zurückgezogen hat, ist nun Qi der de-facto Industriestandard.
Die Übertragung findet im Bereich der Langwelle von 110 bis 205 kHz mit nominal 19 Volt statt. Es gibt mehrere Leistungsklassen von 5-15 Watt (Low Power) bis 120 Watt (Medium Power). Ich glaube, dass dadurch in naher Zukunft auch Anwendungen für andere Geräte mit höherem Energiebedarf ermöglicht werden. Die Übertragung funktioniert meist bei einem Abstand im Bereich einzelner Millimeter. Die Effizienz der Übertragung liegt je nach Gerät bei 60-90%, ist also immer verlustbehafteter im Vergleich zum Laden über Kabel.
Besonders gut hat mir gefallen, dass der Standard auch eine Datenübertragung zwischen den Geräten definiert. Diese ist mit 2 kbit/s spezifiziert und ermöglicht den Informationsaustausch zwischen den Qi-Komponenten. Damit ist nun auch klar, dass der Sendeteil (zB. die Ladeschale) nicht permanent ein starkes elektromagnetisches Feld erzeugt, sondern erst mit höherer Leistung beginnt, sobald ein kompatibles Endgerät erkannt wurde, die Datenverbindung hergestellt ist und die Geräte vereinbart haben, welche Ladung (zB. Leistung) durchgeführt wird.
Kann mein Smartphone Qi und was mache ich, wenn nicht?
Die einfachste Möglichkeit herauszufinden ob das eigene Smartphone Qi unterstützt ist wie üblich: ausprobieren, oder im Handbuch nachlesen. 😉
Samsung Smartphones sind beispielsweise seit dem Samsung S6 Qi-fähig und Apple-Geräte seit dem iPhone 7.
Es ist aber auch möglich, das eigene Smartphone nachzurüsten. Dazu gibt es recht günstig dünne induktive Ladeempfänger, die man zB. in der Schutzhülle des Handys verstecken kann. Diese Empfänger werden zB. per USB Micro (oder Typ C) an das Smartphone angeschlossen. Das Handy merkt eigentlich nicht, dass es induktiv geladen wird, sondern erkennt natürlich nur, dass es an einem „Ladekabel“ hängt. Der USB-Port ist damit natürlich auch belegt – das sollte man beachten. Die Empfänger sind so dünn und oft so passgenau, dass sie zwar einerseits kaum sichtbar/spürbar sind, andererseits aber kaum Spielraum haben und man immer die Hülle herunternehmen muss, falls man den USB-Port anders nutzen möchte.
Ladeempfänger ist zu lang und verdeckt den Fingerprint Sensor teilweise
Außerdem empfehle ich sehr, nachzusehen ob der Ladeempfänger von der Form für das eigene Smartphone passt. Bei meinem ersten Kauf für mein Nexus 5X habe ich einen zu großen Empfänger gekauft, der verdeckt fast die Hälfte des Fingerprint-Scanners. Den verwende ich nicht, also stört es mich nicht, aber hätte ich besser aufgepasst, hätte ich was Passendes um’s gleiche Geld bekommen.
Ergebnisse im Test
Mittlerweile habe ich ein paar Ladeschalen und ein paar Qi-fähige Endgeräte getestet, sowie eine handvoll Handys nachgerüstet.
Es funktioniert alles einwandfrei. Man muss sich daran gewöhnen, dass die Ladezeiten länger werden, weil die meisten kostengünstigen Qi-Geräte 800mAh oder vielleicht 1000mAh schaffen. Damit brauchen moderne Handyakkus schon rein rechnerisch 4-5 Stunden für eine volle Ladung. Aufgrund des Verlusts in der Übertragung wird das nochmal erheblich mehr. Über Nacht ist das aber normalerweise kein Problem.
Ich erwähne die längere Ladezeit nur deswegen so explizit, weil ich das Gefühl habe, dass bei kabelgebundenen Lademöglichkeiten gerade die Erwartungen sehr hoch gesteckt werden, nämlich „mehrere zig“-Prozent in einzelnen Minuten laden zu können. Dort kommen auch Ströme von 4,6 Ampere zum Einsatz, die über den USB-Port in den Akku „gedrückt“ werden. (Vgl. Qualcomm Quick Charge 3 oder 4+).
Eine berichtenswerte Erfahrung habe ich aber auch gemacht: ich habe mir eine Ladeschale ins Büro gelegt. Tagsüber bin ich öfters in Besprechungen und dann meist nur 20 Minuten kurz am Platz die neuen Emails durchschauen. Früher habe ich dabei nie oder selten das Handy angesteckt und aufgeladen. Heute lege ich es regelmäßig bei diesen kurzen Aufenthalten auf die Ladeschale. Und das führt dazu, dass ich tagsüber immer wieder nachlade und so an manchen Tagen eigentlich kaum noch unter 90% auf der Akkuanzeige komme…
Eine weitere Erkenntnis ist, dass man manche Smartphones relativ genau platzieren muss, damit das Laden funktioniert. Die Spulen müssen möglichst übereinander liegen. Ein Samsung S6 zum Beispiel funktioniert auf einem meiner getesteten Ladeschalen (es handelt sich um dieses Modell) nur, wenn ich es eher rechts platziere. Mittig funktioniert es nicht und links auch nicht. Andere Smartphones funktionieren mittig und rechts, aber links auch nicht. Daran habe ich mich aber recht schnell gewöhnt und lege die jeweiligen Geräte mittlerweile ohne viel Nachdenken richtig auf.
Folgende Geräte sind auf den Fotos in diesem Blog gezeigt:
(der Micro USB Empfänger ist nicht mehr lieferbar)
Fazit
Ich liebe es! Einziger Wermutstropfen ist der Energieverlust bei der Übertragung. Das ist sehr schade und Verschwendung. Von der Zuverlässigkeit, Kompatibilität und Geschwindigkeit (für mich ausreichend) alles super!
Immer wieder muss ich meinen Monitor abstecken, um ihn an einen Raspberry anzuschließen. Das nervt.
Nachdem ich mehrere aufsteckbare LCD-Module probiert habe, bin ich mittlerweile an Treiberinstallationen und anzupassenden Kernels verzweifelt.
Jetzt habe ich eine einfache Lösung gefunden: natürlich ist HDMI die richtige Schnittstelle. Da braucht man einfach gar nichts zu konfigurieren, weil’s eh Standard ist.
Auf Aliexpress habe ich ein günstiges 5″ HDMI Display mit 800×480 Pixel Auflösung um € 22,- gefunden. Dieses Display hat auch eine Touch-Oberfläche, die ich aber nicht verwende. (Da befürchte ich wieder Treiberinstallationen und Kernelanpassungen…) Angeschlossen wird es über HDMI, es hat dazu einen Stecker/Adapter, der die beiden HDMI-Ports ganz einfach verbindet.
Das Display habe ich nach ein paar Wochen Lieferzeit erhalten und sofort auf einen Raspberry Pi 3 gesteckt. Funktionert hat es von Anfang an, allerdings nicht in voller Auflösung – es war rechts immer ein Teil unbenutzt. (Ich vermute, dass der Raspberry von 640×480 Pixel (VGA) ausgegangen ist und nicht die vollen 800px Breite genutzt hat. Durch drei Zeilen, die man in der /etc/boot.txt hinzufügt, lässt sich das beheben; ab dem nächsten Reboot wird der Bildschirm vollständig genutzt.
Als Eingabemethode verzichte ich ja auf die Touchscreen-Funktion. Dafür will ich eine Bluetooth-Tastatur oder vielleicht ein Android Handy als Bluetooth-Tastatur nutzen.
In einem anderen Beitrag habe ich darüber berichtet, dass wir erfolgreich über LoRa-Modulation APRS-Pakete gesendet haben und wie ein APRS-Tracker mit Arduino zu bauen und programmieren ist.
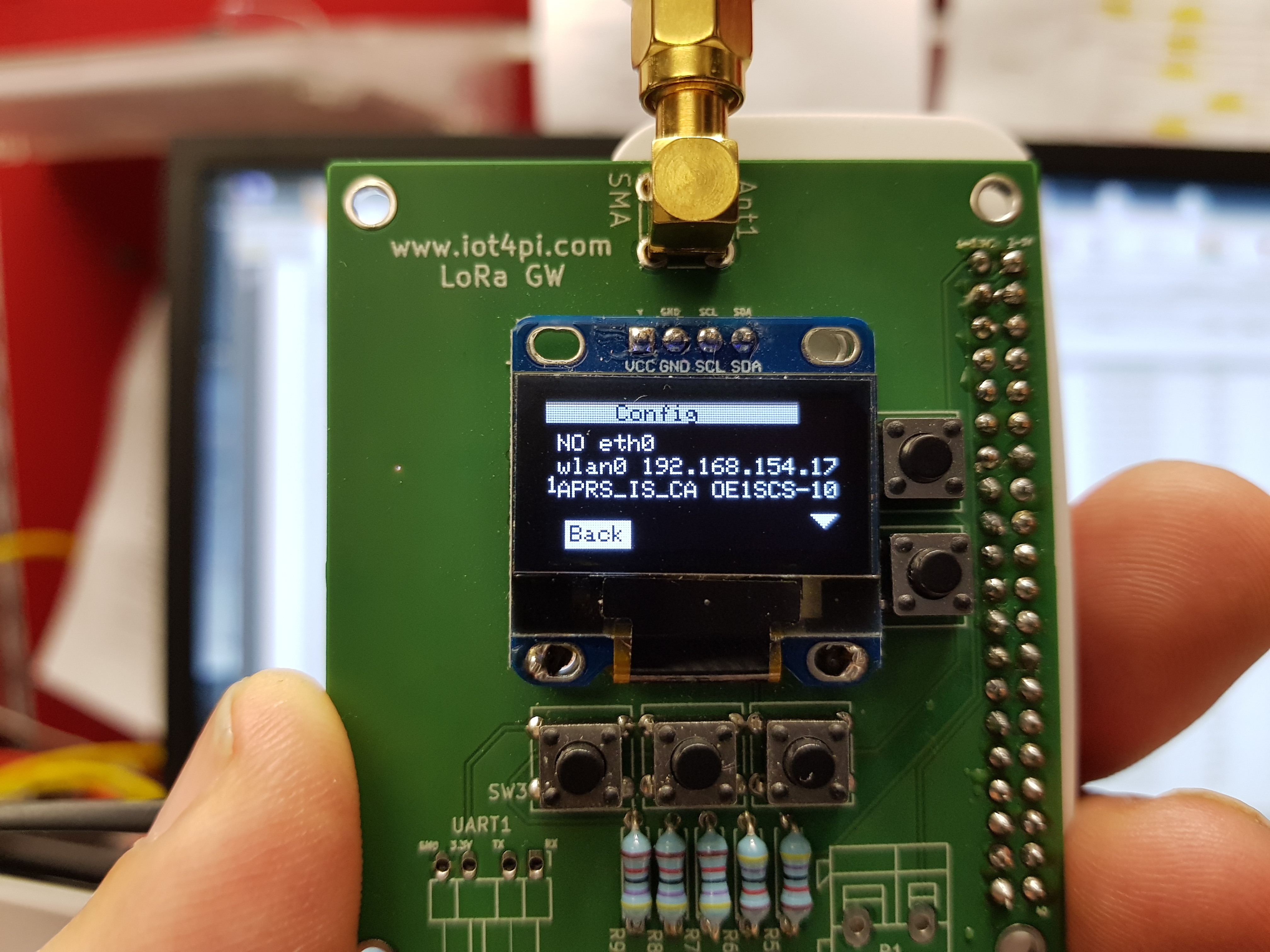
Nun habe ich von Sascha (www.iot4pi.com) ein fertiges, von ihm konstruiertes Board, für einen LoRa APRS Gateway bekommen. Wie er diese Boards erstellt und zusammenbaut, hat er übrigens auf seiner Seite näher beschrieben: www.iot4pi.com/de/bau-des-lora-gateway-shield
Wichtig ist auch, dass man zur Netzwerkanbindung das WLAN am Raspberry Zero W konfigurieren muss. Dazu tragt man in der Datei /etc/wpa_supplicant/wpa_supplicant.conf folgende Zeilen ein:
Da der Gateway nicht für den Außeneinsatz geeignet ist, habe ich mir eine kleine flache Fensterdurchführung zugelegt, mit der ich die Antennenleitung ans Fensterbrett bekomme und dort mit einer 70cm-Magnetfußantenne für 433 MHz verbinde.
Einkaufsliste LoRa APRS Gateway auf Raspberry Pi Zero W