Nun möchte ich in der Status-Zeile ein paar Telemetriedaten übermitteln, die vom Raspberry ausgelesen werden. Konkret sind das:
Core Temperatur
Core Spannung
Core Spannung der SDRAM_p
Clock Speeds von Core und ARM
Dazu habe ich ein Script erstellt, das alle 5 Minuten über cron gestartet wird und die vollständige Status-Zeile in der Datei /tmp/aprs-telemetrie.txt hinterlegt. pymultimonaprs versendet dann den Inhalt dieser Datei als Statusmeldung.
Dieses Script (abgelegt als /home/pi/aprs-telemetrie.sh) liest die Werte aus und erstellt die Datei:
Der Raspberry und DVB-T-Stick sind in einem Outdoor-Gehäuse verbaut.
Mit diesem Setup möchte ich einen APRS iGate realisieren, also eine Konfiguration, mit der APRS-Pakete auf der europäischen APRS-Frequenz 144.800 MHz empfangen und dann weitergeleitet werden. Die Weiterleitung soll primär über HAMnet erfolgen und nur im Fehlerfall oder bei nicht-Verfügbarkeit meiner HAMnet-Anbindung direkt ans einen APRS-IS-Tier2-Server (vgl. http://www.aprs2.net/) ins Internet übertragen werden.
Da pymultimonaprs die Messages nicht selbst dekodiert, müssen wir noch multimon-ng installieren:
cd ~
sudo apt-get install cmake
git clone https://github.com/EliasOenal/multimon-ng.git cd multimon-ng mkdir build cd build cmake .. make sudo make install
Installation
Die iGate-Software pymultimonaprs installiere und hole ich von GIT:
cd ~
sudo apt-get install python2.7 python-pkg-resources
git clone https://github.com/asdil12/pymultimonaprs.git
cd pymultimonaprs
sudo python2 setup.py install
Ich habe für meinen Call OE1SCS den Suffix -10, auch SSID genannt, gewählt, der lt. APRS SSID-Erklärung für „internet, Igates, echolink, winlink, AVRS, APRN, etc“ gedacht ist.
Im Eintrag „gateway“ habe ich eine Liste an APRS-IS Gateways eingetragen. Die Liste wird bei jedem Neustart von pymultimonaprs vom ersten Eintrag neu abgearbeitet. Ich habe also die Gateways, die ich bevorzuge, an den Anfang geschrieben. Die meisten iGates besitzen sprechende DNS-Namen. Ich will jedoch nicht von einem funktionierenden DNS-Dienst abhängig sein, daher trage ich die IP-Adressen ein. Damit dort nicht nur kryptische HAMnet-IP-Adressen (beginnen mit 44.) stehen habe, habe ich in der gleichen Zeile den DNS-Namen zusätzlich hinterlegt, zB.: „aprs.oe2xzr.ampr.at:14580“, „44.143.40.90:14580“
Der Dienst versucht 120 Sekunden die APRS-iGates zu erreichen. Nach 120 Sekunden meldet er ein Timeout und probiert den nächsten iGate. Sollte das Netzwerk nicht verfügbar sein oder der iGate-Server am eingestellten Port nicht antworten, wartet pymultimonaprs das Timeout nicht ab, sondern probiert unmittelbar den nächsten iGate in der Liste.
Hier ein Beispiel aus meinem Logfile:
Jan 2 10:53:42 roofpi pymultimonaprs: connecting... 44.225.42.181:14580
Jan 2 10:53:42 roofpi pymultimonaprs: Error when connecting to 44.225.42.181:14580: '[Errno 101] Network is unreachable'
Jan 2 10:53:51 roofpi pymultimonaprs: connecting... 78.47.75.201:14580
Jan 2 10:53:51 roofpi pymultimonaprs: connected
Jan 2 10:53:51 roofpi pymultimonaprs: # aprsc 2.0.18-ge7666c5
Jan 2 10:53:51 roofpi pymultimonaprs: login OE1SCS-10 (PyMultimonAPRS 1.2.0)
Jan 2 10:53:51 roofpi pymultimonaprs: # logresp OE1SCS-10 verified, server T2EISBERG
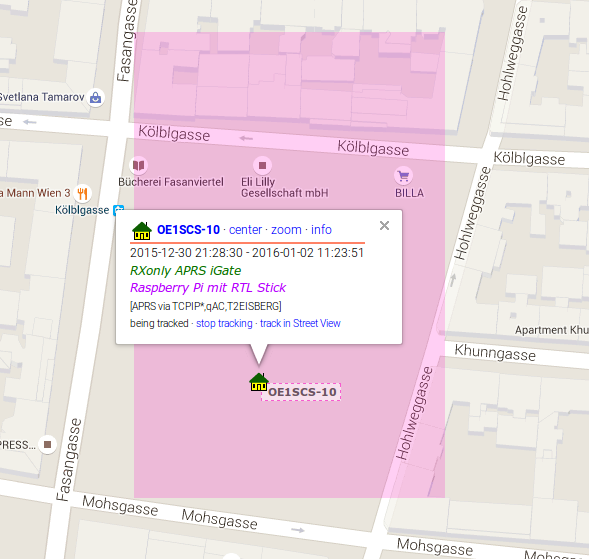
Jan 2 10:53:51 roofpi pymultimonaprs: sending: OE1SCS-10>APRS,TCPIP*:=4811.4 N/01623.2 E-RXonly APRS iGate
Jan 2 10:53:51 roofpi pymultimonaprs: sending: OE1SCS-10>APRS,TCPIP*:>Raspberry Pi mit RTL Stick
Mittels „append_callsign“: true, gebe ich an, dass mein Call in den APRS-Pfad bei der Weiterleitung ans iGates dazugefügt werden soll.
im Abschnitt „rtl“ wähle ich die Frequenz 144.800 MHz als europäische APRS-QRG, gebe meine Ungenauigkeit des Sticks (26 ppm) an, die ich vorher gemessen habe und wähle einen Gain von 46. Offset-Tuning lasse ich unbenutzt und da ich nur einen DVB-T-Stick am Raspberry habe, lasse ich den device-index bei 0.
im Abschnitt „beacon“ konfiguriere ich die eigene, regelmäßige, Aussendung meiner „Station“:
Ich wähle einen statischen Text für „comment“ und „status„, außerdem übertrage ich im Moment keine Wetter-Informationen. Ich möchte, dass meine Aussendung alle 30 Minuten übertragen wird (30 Minuten * 60 Sekunden = 1800 Sekunden).
Um meine Positionen nicht 100%ig genau im APRS darzustellen, habe ich die „ambiguity“ auf „1“ gesetzt. Das verringert die Genauigkeit meiner GPS-Position um 1/10 Grad-Minute. Dadurch wird meine APRS-Position auf aprs.fi mit dem Hinweis „Position ambiguous: Precision reduced at transmitter by 1 digits, position resolution approximately 185.2 m.“ zB. so dargestellt:
meine Station wird bewusst mit einer Ungenauigkeit von ca. 185 Metern in dem violetten Feld angezeigt. Das Feld weist darauf hin, dass die Position nicht exakt ist.
Damit wäre alles konfiguriert und über das Kommando
/etc/init.d/pymultimonaprs start
habe ich den Dienst gestartet.
Die Funktion kann man über das Logfile /var/log/syslog rasch prüfen. Unmittelbar nach dem ersten Start war meine Station auf aprs.fi sichtbar: http://aprs.fi/info/a/OE1SCS-10
Erfahrungen, Tipps & Tricks
Zuverlässigkeit des USB-Sticks
Ich habe den Dienst einige Tage laufen gelassen. Nach zirka zwei Tagen habe ich folgende Fehlermeldung im Logfile gehabt. Auch über „dmesg“ war das Problem sichtbar:
Dec 30 21:23:34 roofpi kernel: [ 2139.021653] usb 1-1.3: usbfs: usb_submit_urb returned -121
Dec 30 21:23:34 roofpi kernel: [ 2139.022123] usb 1-1.3: usbfs: usb_submit_urb returned -121
Dec 30 21:23:34 roofpi kernel: [ 2139.022580] usb 1-1.3: usbfs: usb_submit_urb returned -121
Dec 30 21:23:34 roofpi kernel: [ 2139.023041] usb 1-1.3: usbfs: usb_submit_urb returned -121
Dec 30 21:23:34 roofpi kernel: [ 2139.023968] usb 1-1.3: USB disconnect, device number 4
Dec 30 21:23:34 roofpi kernel: [ 2139.260292] usb 1-1.3: new high-speed USB device number 6 using dwc_otg
Dec 30 21:23:34 roofpi kernel: [ 2139.372309] usb 1-1.3: New USB device found, idVendor=0bda, idProduct=2832
Dec 30 21:23:34 roofpi kernel: [ 2139.372335] usb 1-1.3: New USB device strings: Mfr=1, Product=2, SerialNumber=3
Dec 30 21:23:34 roofpi kernel: [ 2139.372353] usb 1-1.3: Product: RTL2832U
Dec 30 21:23:34 roofpi kernel: [ 2139.372369] usb 1-1.3: Manufacturer: Generic
Dec 30 21:23:34 roofpi kernel: [ 2139.372386] usb 1-1.3: SerialNumber: 77771111153705700
Es hat sich also der USB-Stick verabschiedet „usb 1-1.3: USB disconnect, device number 4“ und sofort wieder neu verbunden. Damit war natürlich ein Neustart des pymultimonaprs nötig, damit dieses wieder korrekt lauscht. Leider war es damit nicht getan und der Fehler ist wenige Minuten später wieder gekommen. Ich habe das ein paar Mal wiederholt und schon befürchtet, dass der Stick vielleicht kaputt ist. Ein Reboot hat die Situation aber entschärft und nun läuft der Stick wieder seit 2 Tagen stabil.
APRS-Meldungen der ISS
Mit einem einfachen Hack, der unter anderem hier beschrieben wird, soll es möglich sein, neben der primären APRS-Frequenz 144.800 MHz auch die APRS-Frequenz der Raumstation ISS zu empfangen. Diese sendet auf 145.825 MHz. Natürlich können diese Meldungen nur gehört werden, wenn sich die ISS in Reichweite befindet. Es gibt zahlreiche Webseiten im Internet, mit denen der Zeitpunkt der nächsten Überflüge der ISS am eigenen Standorts berechnet werden kann.
Leider hat sich dieser Hack bei mir nicht bewährt: mein Stick schafft es kaum noch APRS-Meldungen zu decoden, wenn er auf beide Frequenzen hört. Die Qualität nimmt rapide ab. Woran es genau liegt, kann ich schwer sagen. Ich habe aber die Vermutung, dass es am Squelch liegt, der bei dieser Konfiguration genutzt werden muss: das Programm rtl_fm, das dem Empfang der Pakete übernimmt, funktioniert ohne Squelch, sofern man nur auf einer QRG hört. Wenn man mehrere QRGs angibt (144.8, 145.825, …) muss ein Squelch-Wert angegeben werden. Ich habe zwar 1 als kleinsten möglichen Wert konfiguriert, vermute aber, dass der Squelch bei APRS-Paketen zu spät reagiert und daher viele Pakete nicht vollständig gehört werden. Sobald ich nur auf 144.8 ohne Squelch höre, empfange ich wieder viel mehr Pakete und alles scheint zu funktionieren.
pymultimonaprs kann auch Wetterdaten mitsenden. Ich habe leider keine Wetterstation, möchte aber Telemetriedaten meines Raspberry Pi 2 übermitteln. Dazu kann man ein JSON-File erstellen, das diesem Format entspricht (Quelle: https://github.com/asdil12/pymultimonaprs/blob/master/README.md):
You can set weather to a json-file. eg: "weather": "/path/to/weather.json",
If you don’t want do send weather date, just leave it on false. This will be read in like the status-file and can look like that:
timestamp is seconds since epoch – must be included
wind
speed is in km/h
direction is in deg
gust is in km/h
temperature is in °C
rain
rainlast1h is in mm
rainlast24h is in mm
rainmidnight is in mm
humidity is in %
pressure is in hPa
The timestamp must be included – everything else is optional.
Meine Idee wäre, die Temperatur & Spannung des Raspberry Core zu übermitteln, die mittels des Kommandos „vcgencmd“ ermittelt werden können. Details siehe hier: http://elinux.org/RPI_vcgencmd_usage
Ich müsste also ein JSON-File erstellen, in das ich
Für die Spannungen ist kein Feld in den Wetterdaten vorgesehen. Man könnte diese Daten also über die „status„-Aussendung übermitteln. Dazu ändert man im Konfig file (/etc/pymultimonaprs.json) im Bereich „status“ folgendes:
AP510 mit SmartBeaconing, zu Fuß + mit Straßenbahn unterwegs
SmartBeaconing ist eine gute Idee: statt per APRS seine Position alle x Sekunden auszusenden und damit das APRS-Netz unnötig zu belasten, wird die Position nur gesendet, sobald es das System „smart“ findet: bei Richtungsänderungen, wesentlichen Geschwindigkeitsänderungen, etc.
Das entlastet das Netz hinsichtlich der Anzahl an Meldungen, die direkt oder über Digipeating übertragen werden und erhöht die Wahrscheinlichkeit für andere Benutzer, dass Airtime für deren Aussendung frei ist.
AP510 im Rucksack in der Straßenbahn (Antenne ist hier testweise eine Nagoya NA-771)
Ich habe überall SmartBeaconing verwendet. Schließlich bin ich großteils im Stadtgebiet von Wien und in der näheren Umgebung unterwegs und dort ist die Dichte an APRS-Empfängern & -Digipeatern sehr hoch.
AP510 APRS Tracker am Boot auf der Adria bei Kroatien im Juni 2015
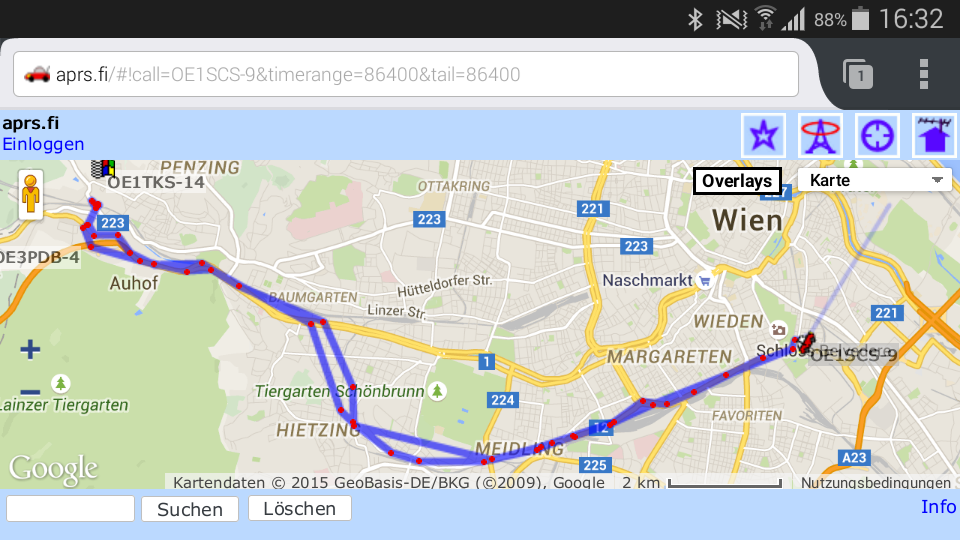
Leider hat sich SmartBeaconing für mich nicht bewährt: obwohl ich mit 5 Watt über eine externe Magnetfußantenne (Nagoya UT-106UV) vom Autodach aus sende, werden nur 30-40% meiner Meldungen aufgenommen. Und das reicht nicht, um die Strecke annähernd korrekt abzubilden. Vor allem, wenn eine Richtungsänderung nur alle 1-2 Minuten passiert, hinterlasse ich nur alle 5 Minuten einen Punkt auf der Map bei dieser schlechten Erfolgsquote der Übertragung.
Ich habe daher SmartBeaconing deaktiviert und sende im Moment stur alle 30 Sekunden. Damit bekomme ich ausreichend Übertragungen zusammen, um die Route gut abzubilden. Gleichzeitig ist mir bewusst, dass dadurch das Netz stärker belastet wird. Da ich aber nicht viel mit dem Auto unterwegs bin, denke ich, dass es zumutbar ist
APRS Strecke mit Argent OpenTracker USB ohne SmartBeaconin
Vor einigen Monaten habe ich mir ein SainSonic AP510 um knapp € 100,- über eBay aus DL gekauft. Ich bin total begeistert! Vielleicht ausnahmsweise mal weniger, weil es etwas Bestimmtes so gut kann. Sondern diesmal weil es so viel kann.
Das Ding wird als „APRS Tracker VHF GPS Bluetooth Thermometer TF Card APRSdroid“ angepriesen. Man sieht schon: da steckt viel drinnen.
Ursprünglich dachte ich, ich kaufe einen APRS Tracker. Ich war froh, dass ein leistungsfähiger Akku (angeblich 3.300mAh LiPo) drinnen ist, der auch wirklich 2 Tage hält, und dass ich kein separates Funkgerät brauche (mit komplizierten und herstellerspezifischen Adapterkabeln), sondern ein Transceiver mit 1 Watt (manche behaupten 1,5 Watt) für VHF (2 Meter-Band) mit drinnen ist.
Auspacken & Inbetriebnahme
Ich möchte da ja nicht zu sehr auf andere Blogger verweisen. Aber lest mal, was die alles erlebt haben! Ich kann das großteils auch bestätigen, aber die zentrale Aussage bleibt: auspacken und gleich mal ein Firmware Upgrade machen. Damit erspart ihr euch diese Erfahrungen und mit der Firmware aus Oktober 2014 funktioniert das Gerät bei mir sehr gut.
Meine Erfahrungen habe ich mit der Software vom 8.10.2014 (20141008) gemacht. Generell kann ich den Thread des Herstellers empfehlen. Die Seite ist zwar 95% chinesisch, aber die Downloads sind zu erkennen und selbsterklärend: http://www.y027.com/dvbbs8/dispbbs.asp?boardid=5&Id=829
Falls das Update-Programm nach dem Start alles chinesisch darstellt, habe ich einen einfachen Trick gefunden: im Verzeichnis des Programms gibt es eine Datei „avrubd.ini“. Öffnet diese mit einem Texteditor und sucht im obersten Block „[last]“ nach „language“ und ändert diese auf „English“:
language=English
Ein paar Dateien werden für den Start der Programme benötigt, zB. mscomm32.ocx oder msstdfmt.dll. Diese Dateien findet ihr im Internet oder auf der Seite eines anderen Bloggers.
In der Version von Oktober 2014 hat sich das Konfigurationsprogramm einwandfrei bedienen lassen.
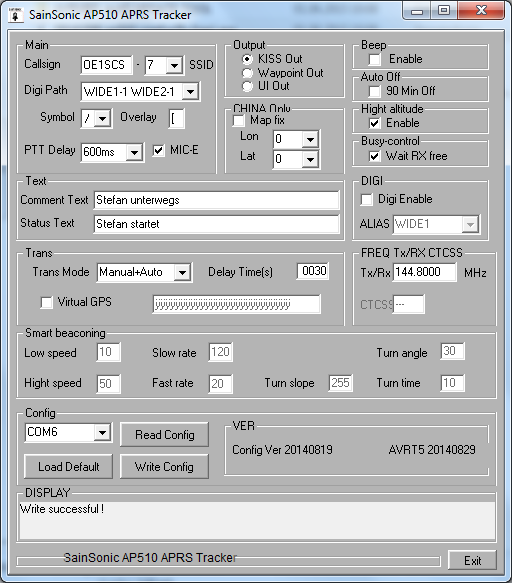
Die Einstellungen sind weitgehend selbsterklärend. Folgende Punkte möchte ich kurz beschreiben:
MIC-E aktiviert die Komrimierung der APRS-Daten. Ich habe damit in OE, S5, HA und 9A keine Probleme gehabt. Die Übertragungsdauer wird durch diese Funktion reduziert.
Smart beaconing: das ist ein lobenswertes Feature, mit dem nicht ununterbrochen periodisch Nachrichten gesendet werden, sondern Meldungen erst dann geschickt werden, wenn sich meine Fahrtrichtung ändert.
Busy-control: damit hört der AP510 kurz in den Kanal, ob dieser frei ist, bevor die eigene APRS-Aussendung beginnt.
Erfahrungen
AP510 im Rucksack in der Straßenbahn (Antenne ist hier testweise eine Nagoya NA-771)
In den nächsten Tagen habe ich das Gerät überall mitgenommen. Zum Testen natürlich.
SainSonic AP510 im Zug mit Antenne Diamond RH951S
Meine Positionsmeldungen wurden großteils gut übertragen, ich habe allerdings in Gebäuden (auch direkt hinter (vmtl. bedampften) Fenstern) oft keinen GPS Fix bekommen.