 Mit dem Dragino LoRa GPS HAT auf meinem Raspberry Pi 2 betreibe ich einen Single Channel Gateway, wie in meinem anderen Beitrag beschrieben.
Mit dem Dragino LoRa GPS HAT auf meinem Raspberry Pi 2 betreibe ich einen Single Channel Gateway, wie in meinem anderen Beitrag beschrieben.
Nachtrag Juli 2017: wir haben mit dem Aufbau einer Community bei The Things Network in Wien begonnen. Das Ziel ist die Schaffung eines freien und offenen Netzes für IoT. Nachdem ich mehrfach auf meinen Blog hin angeschrieben wurde, es den Personen aber nicht bewusst war, dass sich hier was tut, möchte ich auf folgende Links verweisen: folgt uns auf Twitter (@TTN_Vienna), für Updates und Infos zu den nächsten Treffen oder besucht die Wiener Community Seite!
Nun möchte ich auch die GPS-Funktion ausprobieren! Vielleicht kann ich es zur Zeitsynchronisierung nutzen? Naja, vielleicht im Vergleich zu NTP für meine Anforderungen etwas viel Aufwand. Aber schauen wir mal…
Als Antenne verwende ich eine Magnetantenne (für zB. Autos) mit 3m Kabel.
Die serielle Schnittstelle ist am Raspberry mit der Console belegt und muss erst freigegeben werden, bevor wir GPS-Daten empfangen können:
In der Datei /boot/cmdline.txt entfernen wir den Eintrag für
console=/dev/ttyAMA0
Danach beenden und deaktivieren wir das Service für die serielle Ausgabe:
# systemctl stop serial-getty@ttyAMA0.service # systemctl disable serial-getty@ttyAMA0.service
Nun installieren wir gpsd & Co:
# apt-get install gpsd gpsd-clients python-gps
Folgende Zeilen bleiben in meiner /etc/default/gpsd als Konfiguration:
START_DAEMON="true" USBAUTO="true" DEVICES="" GPSD_OPTIONS="/dev/ttyAMA0" GPSD_SOCKET="/var/run/gpsd.sock"
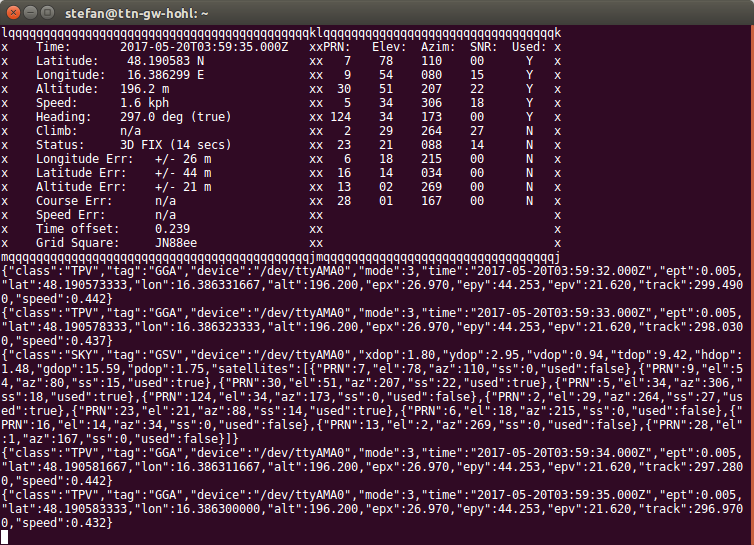
Nach einem Reboot kann ich cgps aufrufen:
An diesen Anleitungen habe ich mich orientiert:
für Raspberry Pi 2
für Raspberry Pi 3 funktioniert es ein bißerl anders.
Hmh
den Eintrag
console=/dev/ttyAMA0
gibts bei mir nicht
meine cmdline.txt
console=serial0,115200 console=tty1 root=PARTUUID=5e3da3da-02 rootfstype=ext4 elevator=deadline fsck.repair=yes rootwait quiet splash plymouth.ignore-serial-consoles
LG Alex
Dann musst du es ev. nicht entfernen. Es geht nur darum, dass Linux beim Booten sich nicht die serielle Schnittstelle für Output krallt.
Funktioniert es?
LgS