Nach der Installation habe ich vor allem Router, Switches und sonstiges Netzwerkequipment eingebunden, das hat super funktioniert. SNMP ist dort meist recht einfach konfigurierbar, ältere Geräte haben nur SNMPv1 akzeptiert, bei neueren klappt’s dann auch mit SNMPv2c und SNMPv3.
Nun möchte ich Linux Server, meist Ubuntu und meist Virtuelle Maschinen, einbinden.
Aktiviere SNMP am Ubuntu Server
Die Server müssen natürlich vom LibreNMS erreichbar sein. SNMPd, also der Daemon (= Dienst), der SNMP-Verbindungen entgegennimmt und beantwortet ist standardmäßig nicht installiert.
Mittels
apt-get update
apt-get install snmpd
ist das schnell erledigt.
Nun antwortet der SNMP-Server jedoch nur auf lokale Anfragen (vom eigenen Host (localhost) bzw. der IP-Adresse 127.0.0.1). Außerdem muss man eine SNMP-Community wählen. Eine SNMP-Community entspricht im weiteren Sinne einem Passwort. Standardmäßig ist meist „public“ für lesenden Zugriff (Read-Only) und „private“ für Schreibzugriff (Read+Write) konfiguriert. Diese Werte müssen unbedingt geändert werden.
Konfiguration SNMPd
Um snmpd zu konfigurieren, öffne ich die Datei /etc/snmp/snmpd.conf:
Mit den oben getätigten Einstellungen nimmt der SNMPd nun Verbindungen von allen IPv4-Adressen an, wenn diese über die Community „MeineGeheimeCommunity“ anfragen.
Damit auch die Location und der Kontakt korrekt über SNMP mitgeteilt werden, passe ich diese in der gleichen Konfigurationsdatei an:
Nun kann ich über das Menü „Devices“ und „Add Device“ den Linux Server einbinden:
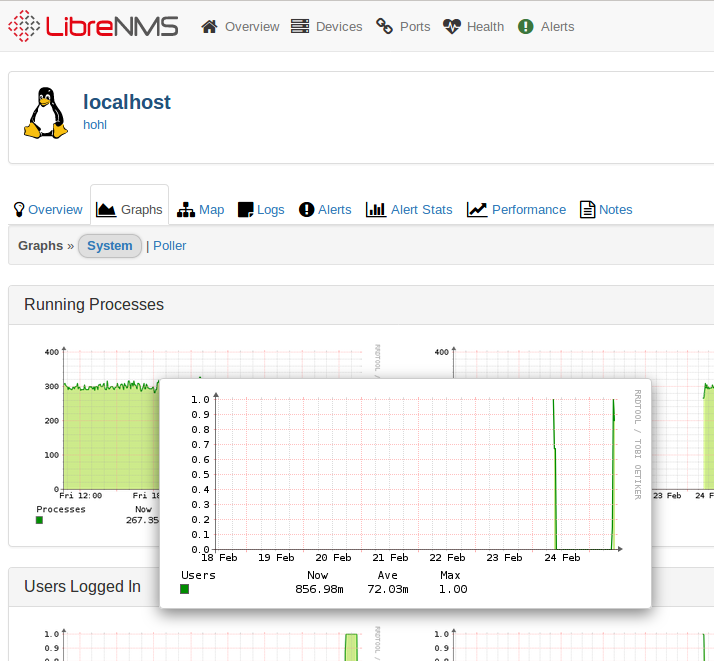
Kurz darauf erscheint der Server in der Liste und LibreNMS sammelt Daten. Nach einigen Stunden hat man dann bereits aussagekräftige Grafiken.
Firewall
Nachdem wir hier den SNMPd so installiert haben, dass dieser allen IP-Adressen (auch aus dem Internet) antworten würde und der einzige Schutz die Community ist, empfehle ich eine lokale Firewall zu installieren, die den Port 161 für UDP schützt und nur vom LibreNMS-Server zulässt.
Auch ein Projekt, das ich schon lange umsetzen wollte: ich möchte eine USV installieren, um bei einem Stromausfall die Netzwerkverbindungen (Internet!) über Funkfeuer aufrecht zu halten. Es sollen
das Funkfeuer-Equipment am Dach,
mein Switch,
der Router
und ein Access Point
abgesichert werden.
Die Anforderungen an die Leistung sind also recht gering (jedenfalls weit unter 100W), daher dachte ich mir, dass eine günstigere USV ausreichen müsste.
Gleichzeitig habe ich nicht die Anforderung, dass ein Server oder NAS bei einem Stromausfall heruntergefahren werden muss. Es handelt sich rein um Netzwerkgeräte, die einfach abgeschaltet werden können sobald die Akkus leer sind und auch wieder zuverlässig starten sobald sie wieder Strom erhalten.
last but not least: sie kann über ein USB-Kabel überwacht werden und ist kompatibel zu gängigen Standards.
Inbetriebnahme
Die USV war rasch in Betrieb genommen. Es muss nur ein Kabel an die Batterie im Batteriefach angeschlossen werden und dann steckt man die USV an die Steckdose. Fertig!
Über zwei LEDs (grün und rot) signalisiert die USV den Zustand und mögliche Defekte.
Überwachung
Es wäre nicht meine Art, die USV einfach vor sich hinlaufen zu lassen und darauf zu hoffen, dass alles in Ordnung ist. Es müssen also eine Überwachung der Funktion sowie ein paar Statistiken her.
Die Daten kann man von der USV über USB abrufen. Server habe ich keinen in der Nähe, also habe ich mich entschieden einen Raspberry Pi der ersten Generation (der schon einige Monate ohne Auftrag herumkugelt) für diese Funktion einzusetzen.
apcupsd auf Raspberry Pi
Als Basissystem habe ich Debian Jessie in der Minimalinstallation (ohne grafischer Oberfläche) gewählt. Mittels
apt-get install apcupsd
ist der Daemon schnell installiert.
Zwei Konfigurationsdateien müssen dann noch angepasst werden:
Die hauptsächliche Konfiguration wird in der Datei /etc/apcupsd/apcupsd.conf vorgenommen. Ich habe nur folgende Zeilen angepasst:
UPSCABLE usb
UPSTYPE usb
DEVICE
Die Zeile „DEVICE“ bleibt bewusst ohne weitere Angabe. Das ist beim USBTYPE „usb“ so vorgesehen. Damit wird die USV automatisch erkannt.
In der Datei /etc/default/apcupsd muss ISCONFIGURED auf „yes“ gesetzt werden, damit der Dienst (beim Booten) startet.
ISCONFIGURED=yes
Nach dem Aufruf von“service apcupsd start“ startet der Daemon.
Mittels „apcaccess status“ kann auch sofort der Status der USV abgerufen werden:
pi@upsberry:~ $ apcaccess status
APC : 001,035,0906
DATE : 2016-12-30 14:58:11 +0100
HOSTNAME : upsberry
VERSION : 3.14.12 (29 March 2014) debian
UPSNAME : upsberry
CABLE : USB Cable
DRIVER : USB UPS Driver
UPSMODE : Stand Alone
STARTTIME: 2016-12-30 10:53:17 +0100
MODEL : Back-UPS ES 700G
STATUS : ONLINE
LINEV : 228.0 Volts
LOADPCT : 0.0 Percent
BCHARGE : 100.0 Percent
TIMELEFT : 38.4 Minutes
MBATTCHG : 5 Percent
MINTIMEL : 3 Minutes
MAXTIME : 0 Seconds
SENSE : Medium
LOTRANS : 180.0 Volts
HITRANS : 266.0 Volts
ALARMDEL : 30 Seconds
BATTV : 13.5 Volts
LASTXFER : Unacceptable line voltage changes
NUMXFERS : 1
XONBATT : 2016-12-30 10:56:54 +0100
TONBATT : 0 Seconds
CUMONBATT: 53 Seconds
XOFFBATT : 2016-12-30 10:57:47 +0100
STATFLAG : 0x05000008
SERIALNO : 5B16xxx
BATTDATE : 2016-08-05
NOMINV : 230 Volts
NOMBATTV : 12.0 Volts
FIRMWARE : 871.O4 .I USB FW:O4
END APC : 2016-12-30 14:58:53 +0100
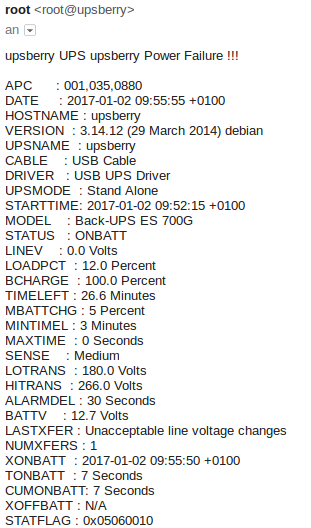
Alarmierung per Email
Beispiel einer Email-Benachrichtigung nach Ausfall der Netzspannung
Wie beschrieben benötige ich keine weiteren Maßnahmen bei einem Stromausfall. Es muss also kein Server oder NAS runtergefahren werden. Ich möchte aber schon ein Email erhalten, das mir eine Statusänderung mitteilt.
In meinem Fall habe ich einen lokalen Mailserver installiert, der die Emails direkt zustellt (ohne Smarthost bzw. nicht über einen anderen SMTP-Server).
apt-get install sendmail
Um den Emailversand zu aktivieren, gehören zwei Zeilen in der /etc/apcupsd/apccontrol angepasst:
Nach dem Neustart des apcupsd habe ich die USV von der Stromversorgung getrennt und kurz darauf ein Email mit der Warnmeldung „UPS Power Failure!!!“ erhalten.
Webinterface
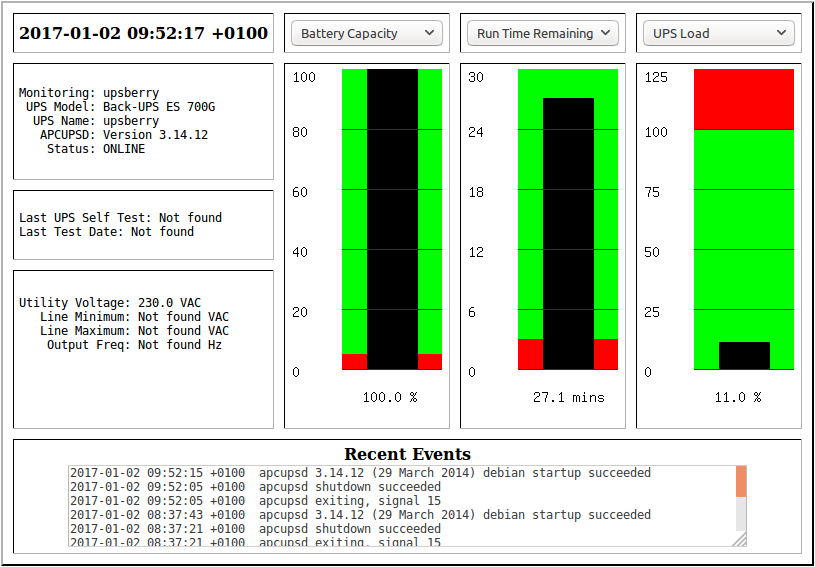
upsstats.cgi
Für die Anzeige von Statistiken am Webinterface gibt es vier CGIs:
multimon.cgi: hier wird übersichtlich der Status angezeigt. Das ist vor allem sinnvoll, wenn mehrere USVs von einem Daemon überwacht werden sollen:
apcupsd multimon.cgi – alles OK
apcupsd multimon.cgi – Ausfall der Stromversorgung
upsstats.cgi: detaillierte Statistik zu einer USV (siehe Screenshot oben)
upsfstats.cgi: textbasierter Output, wie beim CLI Tool „apcaccess status“ (siehe oben)
upsimage.cgi: hat bei mir nicht funktioniert
Installiert ist das Ganze recht einfach:
apt-get install apcupsd-cgi apache2
a2enmod cgi
Hiermit wird ein Apache Webserver installiert (falls nicht schon vorhanden) und die CGIs im Verzeichnis /usr/lib/cgi-bin/ hinterlegt. Über das a2enmod-Kommando wird CGI am Webserver aktiviert.
Ab sofort kann man mit dem Webbrowser die Statistiken zur USV abrufen. Da der Webserver nur vom internen LAN (nicht im Internet) erreichbar ist und auch auf dem Server keine weiteren Dienste laufen, habe ich mir die index.html im /var/www/html-Verzeichnis mit folgenden Einträgen überschrieben, um die CGIs gemütlich aufrufen zu können:
Ich betreibe mehrere Standorte, die im Wiener Funkfeuer-Netz verteilt sind. Mich interessiert die Performance (vor allem die Bandbreite vom bzw. zum Internet), die ja abhängig von Tages- oder Jahreszeit schwanken kann.
Update Dezember 2016: das Tool speedtest-cli ist durch speedtest.py, das vom gleichen Entwickler geschrieben wurde und die gleichen Möglichkeiten bietet, abgelöst worden. Die Installation ist daher abweichend. Ich habe die neue Vorgehensweise in einem neuen Beitrag erklärt. Die hier beschriebenen Optionen und Möglichkeit haben jedoch weiterhin Gültigkeit.
Bisherwar ich recht erfolgreich mit Bandbreite iPerf. Dazu benötige ich aber zwei Geräte, zwischen denen dann die Bandbreite gemessen wird – das ist die richtige Methode, wenn man zB. eine Funk-Verbindung zwischen zwei Geräten messen möchte. Aber wenn ich die Internet-Performance messen möchte, muss ich zwei Geräte bedienen. Die Ergebnisse sind dafür belastbar, sind nachvollziehbar/plausibel und spiegeln die erlebte Performance wider.
Heute haben mir Freunde ein Messergebnis geschickt, das eindeutig über die CLI gemessen wurde. Dabei ist mir die Idee gekommen, auch meine EdgeRouter (und EdgePoints, also die Outdoor-Variante) damit auszurüsten und in Zukunft selbst gemütlich über die CLI testen zu können. Also hab‘ ich mir das gleich angesehen:
Man benötigt nur das .py-Script, das recht einfach am EdgeRouter heruntergeladen werden kann. Damit es auch nach einem Update des Routers verfügbar bleibt, speichere ich es in /config/user-data:
(Weil wget im Standard-Image nicht installiert ist, verwende ich curl -o. Weil unzip nicht verfügbar ist, lade ich das .py-Script vom letzten master-Branch raw von github).
Danach markiere ich das Script als ausführbar:
chmod u+x /config/user-data/speedtest_cli.py
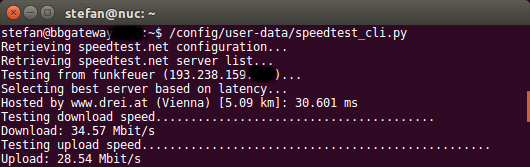
Und schon kann’s losgehen, ich starte einen Speedtest mittels:
/config/user-data/speedtest_cli.py
Das Ergebnis überzeugt mich:
Optionen
Es gibt noch ein paar erwähnenswerte Optionen zu dem Tool. Vor allem –simple könnte zB. für Scripts interessant sein:
–simple zeigt nur den Output an: Ping/RTT, Download- & Uploadraten.
/config/user-data/speedtest_cli.py --simple
ergibt:
Ping: 26.968 ms
Download: 38.36 Mbit/s
Upload: 27.19 Mbit/s
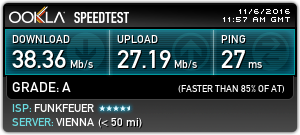
–share liefert eine URL zurück, bei der das Ergebnis grafisch dargestellt wird:
–server SERVER-ID nutzt den Zielserver mit der entsprechenden ID. Diese kann man in der Liste aller verfügbaren Server finden, welche mittels –list abgerufen wird
Ich werde das sehr oft gefragt, daher ist es mir einen Beitrag wert:
„Wieso wurde mein/e … gehackt? Was hat der/die Hacker/in davon? Es ist ja nur ein kleines Gerät im Internet!“
Die Antwort ist eigentlich ganz einfach, aber schwierig kurz und prägnant zu erklären.
Viele dieser „kleinen“ Geräte, die da gehackt werden – egal ob Antenne, Router, Smartphones oder andere – besitzen ein mächtiges Betriebssystem, und das kann dem Zweck des Hackers nutzen. Es geht also nicht darum, das Gerät vom Netz zu trennen oder die Funktion einzuschränken: es geht darum, Zugrif auf das Gerät zu erlangen und dieses künftig für eigene Zwecke (mit) zu nutzen.
Oft wird die ursprüngliche Funktion des Geräts gar nicht beeinträchtigt – sonst würden die Besitzer ja merken, dass sie gehackt wurden und danach streben, die schadhafte Software zu entfernen. Ist doch praktischer, wenn’s keiner merkt…
Die Geräte werden oft so umprogrammiert (bzw. wird zusätzlich Software installiert), sodass sie auf Arbeitsaufträge („Kommandos“) aus dem Internet horchen und diese dann ausführen. Sie sind dann an sogenannte „Command and Control“-Systeme/-Server angebunden.
Das klingt jetzt noch nicht mächtig, aber wenn man berücksichtigt, dass hunderttausende solcher Geräte, über die Welt verteilt, an so einem System teilhaben, wird klarer, welches Potenzial dadurch entsteht.
Dieses Thema wird sich meiner Einschätzung nach im Zukunft noch zuspitzen: es werden immer mehr Geräte werden ans Internet angebunden und diese werden auch immer leistungsfähiger. Dadurch eignen sie sich immer mehr für solche Aktionen… Man nennt das auch die Ära des Internet of Things (IoT), auf die wir uns rasant zubewegen.
Was kann man dagegen tun? Ein wesentlicher Tipp ist bestimmt, möglichst aktuelle Updates einzuspielen, die häufig Sicherheitslücken beheben, mit denen Angreifer überhaupt die Möglichkeiten bekommen, Zugang zum Gerät zu erlangen und Schadsoftware aufzuspielen. Ansonsten rate ich weiterhin dazu, bewusster zu überlegen, ob wirklich alle Geräte ans Internet angebunden sein müssen bzw. Zugriff darauf haben müssen. Reicht es nicht, wenn zB. Elemente einer Hausautomatisierung mit der Zentrale kommunizieren können? Muss denn jedes Gerät uneingeschränkt mit dem Internet Daten austauschen können?
Mich hat ein aktuelles Ereignis (auch hier sehr gut beschrieben) zu diesem Beitrag inspiriert, außerdem wird dieses Thema nun auch von den Medien verstärkt aufgegriffen und verstanden. In diesem Fall haben hunderttausende Geräte die Kapazität ihrer Internetanbindung genutzt, um die Anbindungen und Bandbreiten großer Webportale lahmzulegen. Das nennt man eine Distributed Denial of Service-Attacke.
Nun möchte ich in der Status-Zeile ein paar Telemetriedaten übermitteln, die vom Raspberry ausgelesen werden. Konkret sind das:
Core Temperatur
Core Spannung
Core Spannung der SDRAM_p
Clock Speeds von Core und ARM
Dazu habe ich ein Script erstellt, das alle 5 Minuten über cron gestartet wird und die vollständige Status-Zeile in der Datei /tmp/aprs-telemetrie.txt hinterlegt. pymultimonaprs versendet dann den Inhalt dieser Datei als Statusmeldung.
Dieses Script (abgelegt als /home/pi/aprs-telemetrie.sh) liest die Werte aus und erstellt die Datei:
Der Raspberry und DVB-T-Stick sind in einem Outdoor-Gehäuse verbaut.
Mit diesem Setup möchte ich einen APRS iGate realisieren, also eine Konfiguration, mit der APRS-Pakete auf der europäischen APRS-Frequenz 144.800 MHz empfangen und dann weitergeleitet werden. Die Weiterleitung soll primär über HAMnet erfolgen und nur im Fehlerfall oder bei nicht-Verfügbarkeit meiner HAMnet-Anbindung direkt ans einen APRS-IS-Tier2-Server (vgl. http://www.aprs2.net/) ins Internet übertragen werden.
Da pymultimonaprs die Messages nicht selbst dekodiert, müssen wir noch multimon-ng installieren:
cd ~
sudo apt-get install cmake
git clone https://github.com/EliasOenal/multimon-ng.git cd multimon-ng mkdir build cd build cmake .. make sudo make install
Installation
Die iGate-Software pymultimonaprs installiere und hole ich von GIT:
cd ~
sudo apt-get install python2.7 python-pkg-resources
git clone https://github.com/asdil12/pymultimonaprs.git
cd pymultimonaprs
sudo python2 setup.py install
Ich habe für meinen Call OE1SCS den Suffix -10, auch SSID genannt, gewählt, der lt. APRS SSID-Erklärung für „internet, Igates, echolink, winlink, AVRS, APRN, etc“ gedacht ist.
Im Eintrag „gateway“ habe ich eine Liste an APRS-IS Gateways eingetragen. Die Liste wird bei jedem Neustart von pymultimonaprs vom ersten Eintrag neu abgearbeitet. Ich habe also die Gateways, die ich bevorzuge, an den Anfang geschrieben. Die meisten iGates besitzen sprechende DNS-Namen. Ich will jedoch nicht von einem funktionierenden DNS-Dienst abhängig sein, daher trage ich die IP-Adressen ein. Damit dort nicht nur kryptische HAMnet-IP-Adressen (beginnen mit 44.) stehen habe, habe ich in der gleichen Zeile den DNS-Namen zusätzlich hinterlegt, zB.: „aprs.oe2xzr.ampr.at:14580“, „44.143.40.90:14580“
Der Dienst versucht 120 Sekunden die APRS-iGates zu erreichen. Nach 120 Sekunden meldet er ein Timeout und probiert den nächsten iGate. Sollte das Netzwerk nicht verfügbar sein oder der iGate-Server am eingestellten Port nicht antworten, wartet pymultimonaprs das Timeout nicht ab, sondern probiert unmittelbar den nächsten iGate in der Liste.
Hier ein Beispiel aus meinem Logfile:
Jan 2 10:53:42 roofpi pymultimonaprs: connecting... 44.225.42.181:14580
Jan 2 10:53:42 roofpi pymultimonaprs: Error when connecting to 44.225.42.181:14580: '[Errno 101] Network is unreachable'
Jan 2 10:53:51 roofpi pymultimonaprs: connecting... 78.47.75.201:14580
Jan 2 10:53:51 roofpi pymultimonaprs: connected
Jan 2 10:53:51 roofpi pymultimonaprs: # aprsc 2.0.18-ge7666c5
Jan 2 10:53:51 roofpi pymultimonaprs: login OE1SCS-10 (PyMultimonAPRS 1.2.0)
Jan 2 10:53:51 roofpi pymultimonaprs: # logresp OE1SCS-10 verified, server T2EISBERG
Jan 2 10:53:51 roofpi pymultimonaprs: sending: OE1SCS-10>APRS,TCPIP*:=4811.4 N/01623.2 E-RXonly APRS iGate
Jan 2 10:53:51 roofpi pymultimonaprs: sending: OE1SCS-10>APRS,TCPIP*:>Raspberry Pi mit RTL Stick
Mittels „append_callsign“: true, gebe ich an, dass mein Call in den APRS-Pfad bei der Weiterleitung ans iGates dazugefügt werden soll.
im Abschnitt „rtl“ wähle ich die Frequenz 144.800 MHz als europäische APRS-QRG, gebe meine Ungenauigkeit des Sticks (26 ppm) an, die ich vorher gemessen habe und wähle einen Gain von 46. Offset-Tuning lasse ich unbenutzt und da ich nur einen DVB-T-Stick am Raspberry habe, lasse ich den device-index bei 0.
im Abschnitt „beacon“ konfiguriere ich die eigene, regelmäßige, Aussendung meiner „Station“:
Ich wähle einen statischen Text für „comment“ und „status„, außerdem übertrage ich im Moment keine Wetter-Informationen. Ich möchte, dass meine Aussendung alle 30 Minuten übertragen wird (30 Minuten * 60 Sekunden = 1800 Sekunden).
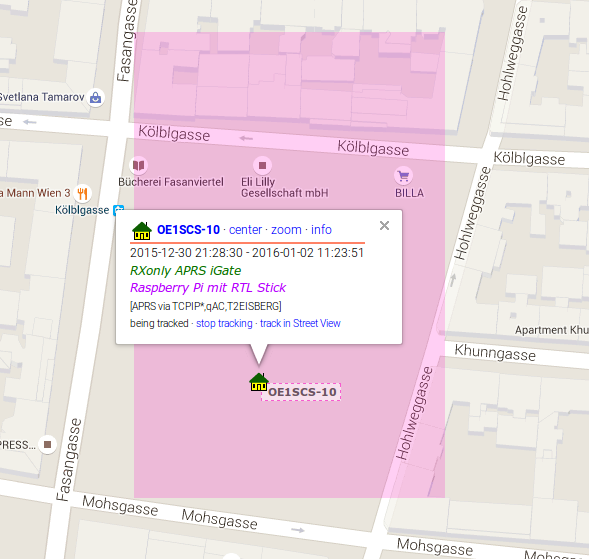
Um meine Positionen nicht 100%ig genau im APRS darzustellen, habe ich die „ambiguity“ auf „1“ gesetzt. Das verringert die Genauigkeit meiner GPS-Position um 1/10 Grad-Minute. Dadurch wird meine APRS-Position auf aprs.fi mit dem Hinweis „Position ambiguous: Precision reduced at transmitter by 1 digits, position resolution approximately 185.2 m.“ zB. so dargestellt:
meine Station wird bewusst mit einer Ungenauigkeit von ca. 185 Metern in dem violetten Feld angezeigt. Das Feld weist darauf hin, dass die Position nicht exakt ist.
Damit wäre alles konfiguriert und über das Kommando
/etc/init.d/pymultimonaprs start
habe ich den Dienst gestartet.
Die Funktion kann man über das Logfile /var/log/syslog rasch prüfen. Unmittelbar nach dem ersten Start war meine Station auf aprs.fi sichtbar: http://aprs.fi/info/a/OE1SCS-10
Erfahrungen, Tipps & Tricks
Zuverlässigkeit des USB-Sticks
Ich habe den Dienst einige Tage laufen gelassen. Nach zirka zwei Tagen habe ich folgende Fehlermeldung im Logfile gehabt. Auch über „dmesg“ war das Problem sichtbar:
Dec 30 21:23:34 roofpi kernel: [ 2139.021653] usb 1-1.3: usbfs: usb_submit_urb returned -121
Dec 30 21:23:34 roofpi kernel: [ 2139.022123] usb 1-1.3: usbfs: usb_submit_urb returned -121
Dec 30 21:23:34 roofpi kernel: [ 2139.022580] usb 1-1.3: usbfs: usb_submit_urb returned -121
Dec 30 21:23:34 roofpi kernel: [ 2139.023041] usb 1-1.3: usbfs: usb_submit_urb returned -121
Dec 30 21:23:34 roofpi kernel: [ 2139.023968] usb 1-1.3: USB disconnect, device number 4
Dec 30 21:23:34 roofpi kernel: [ 2139.260292] usb 1-1.3: new high-speed USB device number 6 using dwc_otg
Dec 30 21:23:34 roofpi kernel: [ 2139.372309] usb 1-1.3: New USB device found, idVendor=0bda, idProduct=2832
Dec 30 21:23:34 roofpi kernel: [ 2139.372335] usb 1-1.3: New USB device strings: Mfr=1, Product=2, SerialNumber=3
Dec 30 21:23:34 roofpi kernel: [ 2139.372353] usb 1-1.3: Product: RTL2832U
Dec 30 21:23:34 roofpi kernel: [ 2139.372369] usb 1-1.3: Manufacturer: Generic
Dec 30 21:23:34 roofpi kernel: [ 2139.372386] usb 1-1.3: SerialNumber: 77771111153705700
Es hat sich also der USB-Stick verabschiedet „usb 1-1.3: USB disconnect, device number 4“ und sofort wieder neu verbunden. Damit war natürlich ein Neustart des pymultimonaprs nötig, damit dieses wieder korrekt lauscht. Leider war es damit nicht getan und der Fehler ist wenige Minuten später wieder gekommen. Ich habe das ein paar Mal wiederholt und schon befürchtet, dass der Stick vielleicht kaputt ist. Ein Reboot hat die Situation aber entschärft und nun läuft der Stick wieder seit 2 Tagen stabil.
APRS-Meldungen der ISS
Mit einem einfachen Hack, der unter anderem hier beschrieben wird, soll es möglich sein, neben der primären APRS-Frequenz 144.800 MHz auch die APRS-Frequenz der Raumstation ISS zu empfangen. Diese sendet auf 145.825 MHz. Natürlich können diese Meldungen nur gehört werden, wenn sich die ISS in Reichweite befindet. Es gibt zahlreiche Webseiten im Internet, mit denen der Zeitpunkt der nächsten Überflüge der ISS am eigenen Standorts berechnet werden kann.
Leider hat sich dieser Hack bei mir nicht bewährt: mein Stick schafft es kaum noch APRS-Meldungen zu decoden, wenn er auf beide Frequenzen hört. Die Qualität nimmt rapide ab. Woran es genau liegt, kann ich schwer sagen. Ich habe aber die Vermutung, dass es am Squelch liegt, der bei dieser Konfiguration genutzt werden muss: das Programm rtl_fm, das dem Empfang der Pakete übernimmt, funktioniert ohne Squelch, sofern man nur auf einer QRG hört. Wenn man mehrere QRGs angibt (144.8, 145.825, …) muss ein Squelch-Wert angegeben werden. Ich habe zwar 1 als kleinsten möglichen Wert konfiguriert, vermute aber, dass der Squelch bei APRS-Paketen zu spät reagiert und daher viele Pakete nicht vollständig gehört werden. Sobald ich nur auf 144.8 ohne Squelch höre, empfange ich wieder viel mehr Pakete und alles scheint zu funktionieren.
pymultimonaprs kann auch Wetterdaten mitsenden. Ich habe leider keine Wetterstation, möchte aber Telemetriedaten meines Raspberry Pi 2 übermitteln. Dazu kann man ein JSON-File erstellen, das diesem Format entspricht (Quelle: https://github.com/asdil12/pymultimonaprs/blob/master/README.md):
You can set weather to a json-file. eg: "weather": "/path/to/weather.json",
If you don’t want do send weather date, just leave it on false. This will be read in like the status-file and can look like that:
timestamp is seconds since epoch – must be included
wind
speed is in km/h
direction is in deg
gust is in km/h
temperature is in °C
rain
rainlast1h is in mm
rainlast24h is in mm
rainmidnight is in mm
humidity is in %
pressure is in hPa
The timestamp must be included – everything else is optional.
Meine Idee wäre, die Temperatur & Spannung des Raspberry Core zu übermitteln, die mittels des Kommandos „vcgencmd“ ermittelt werden können. Details siehe hier: http://elinux.org/RPI_vcgencmd_usage
Ich müsste also ein JSON-File erstellen, in das ich
Für die Spannungen ist kein Feld in den Wetterdaten vorgesehen. Man könnte diese Daten also über die „status„-Aussendung übermitteln. Dazu ändert man im Konfig file (/etc/pymultimonaprs.json) im Bereich „status“ folgendes:
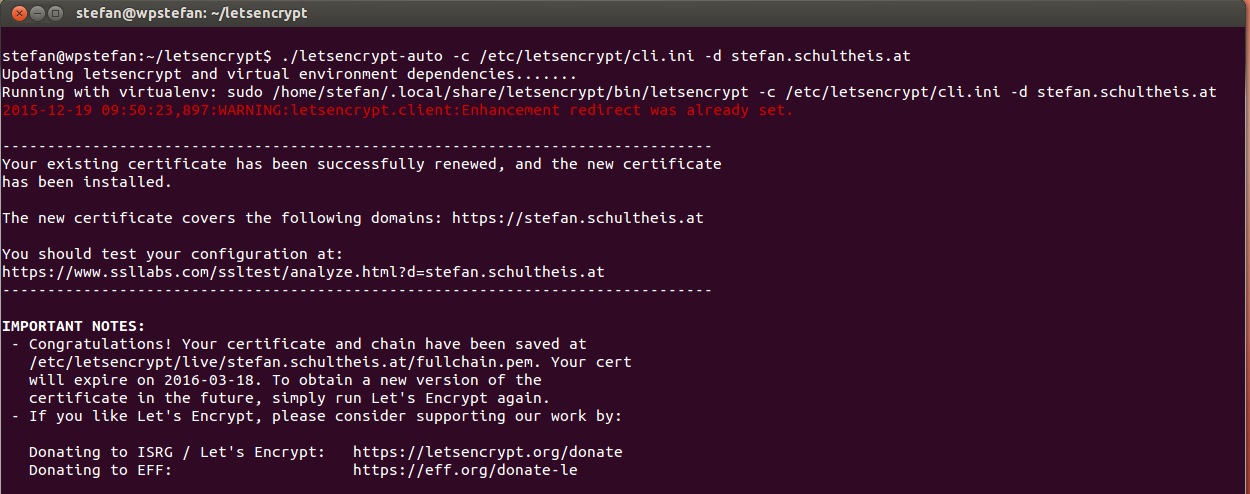
Im vorigen Beitrag habe ich für diesen Blog ein Zertifikat von Let’s encrypt! erstellt. Dieses ist 3 Monate gültig. Es ist vorgesehen, dass das Erneuern des Zertifikats automatisch passiert.
Konkret werde ich einen Cronjob erstellen, der monatlich ein neues Zertifikat mit Hilfe des „letsencrypt-auto“ Python-Script bezieht.
Konfiguration
Um mir eine Menge Kommandozeilenoptionen zu ersparen, erstelle ich eine Konfigurationsdatei /etc/letsencrypt/cli.ini, die meine Standardwerte enthält:
rsa-key-size = 4096
text
redirect
renew-by-default
agree-tos
email = meine.email@adresse.at
Hier sind die Parameter kurz erklärt:
rsa-key-size
entweder 2048 (Standard) oder sicherer mit 4096 Bit. Ich möchte meine Zertifikate mit 4096 Bit RSA erstellen.
text
nur im Text-Modus starten (ohne Menüführung). Schließlich soll der Client automatisch im Hintergrund funktionieren.
redirect
ich wurde immer gefragt:
Please choose whether HTTPS access is required or optional.
-------------------------------------------------------------------------------
1: Easy - Allow both HTTP and HTTPS access to these sites
2: Secure - Make all requests redirect to secure HTTPS access
-------------------------------------------------------------------------------
Select the appropriate number [1-2] then [enter] (press 'c' to cancel):
Um diese Frage vorab zu beantworten, fügt man entweder die CLI-Option „–redirect“ an, oder eben in der cli.ini den Ausdruck „redirect“. Damit wird die Option 2 gewählt: make all requests redirect to secure HTTPS access.
renew-by-default
Erneuert das Zertifikat standardmäßig.
agree-tos
Damit stimmt man den Regeln von let’s encrypt! zu. Schließlich wollen wir den Vorgang ja per Cronjob automatisieren und nicht die Regeln manuell bestätigen müssen.
email
Die Email-Adresse, mit der ich bei let’s encrypt! registiert bin.
Damit bekomme ich jedes Monat am 20. Tag das Zertifikat erneuert. Da derzeit das Zertifikat für 90 Tage gültig ist, bin ich damit auf der sicheren Seite und habe immer ein Zertifikat, das maximal 31 Tage alt ist.
 Installiert habe ich LibreNMS nach dieser Anleitung von Oliver Marshall, das hat auf Anhieb super geklappt: http://olivermarshall.net/how-to-install-librenms-on-ubuntu/
Installiert habe ich LibreNMS nach dieser Anleitung von Oliver Marshall, das hat auf Anhieb super geklappt: http://olivermarshall.net/how-to-install-librenms-on-ubuntu/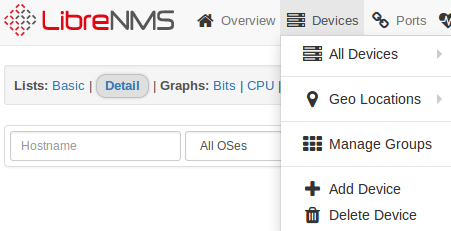 Nun kann ich über das Menü „Devices“ und „Add Device“ den Linux Server einbinden:
Nun kann ich über das Menü „Devices“ und „Add Device“ den Linux Server einbinden: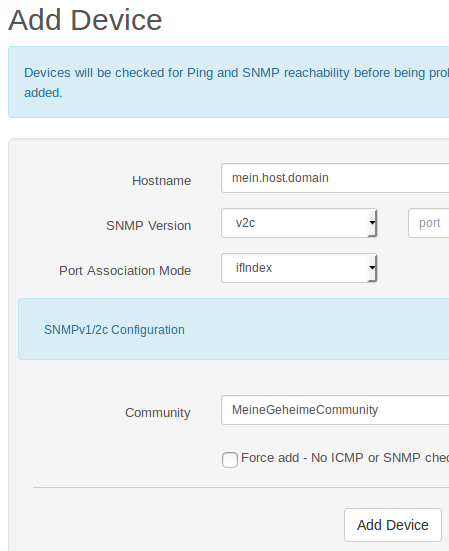 Kurz darauf erscheint der Server in der Liste und LibreNMS sammelt Daten. Nach einigen Stunden hat man dann bereits aussagekräftige Grafiken.
Kurz darauf erscheint der Server in der Liste und LibreNMS sammelt Daten. Nach einigen Stunden hat man dann bereits aussagekräftige Grafiken.